
Y a-t-il un robot pilote dans l’avion ?
L’automatique et le traitement du signal s’intéressent au monde physique, que ce soit pour l’analyser ou le contrôler voire le commander. Extraire l’information utile des mesures provenant de capteurs, tel est l’objectif du traitement du signal. L’automatique, quant à elle, a pour objectif de contrôler les systèmes complexes en synthétisant les signaux à envoyer aux actionneurs qui les pilotent.
27 avril 2005 : l’Airbus A380, le plus gros avion du monde, un monstre de 420 tonnes, effectue son premier vol d’essai. Il décolle de l’aéroport de Toulouse-Blagnac pour revenir se poser en douceur quelques heures plus tard. Aujourd’hui on ne s’étonne plus de voir passer ce type d’appareil, comme sur la photo, prise au-dessus de la mégapole Santiago, au Chili. Mais comment un seul pilote peut-il commander un tel engin sans effort ? Comment le vol et surtout l’atterrissage d’un tel avion sont-ils possibles par temps de pluie, de brouillard ou la nuit ? En fait, l’avion est bardé de capteurs qui mesurent position et vitesse de l’avion, température et pression de l’air… Il comporte aussi des actionneurs qui commandent la puissance des réacteurs, les positions des volets et des ailerons… Les ordinateurs de bord extraient les informations utiles à partir des signaux mesurés par les capteurs, puis ils élaborent des commandes, appliquées aux actionneurs, qui garantissent un vol stable et un atterrissage sûr. Ces résultats sont obtenus grâce aux méthodes rigoureuses du traitement du signal et de l’automatique.
Au cœur des systèmes
Ces deux disciplines voisines sont au cœur de beaucoup d’applications industrielles. Dans l’industrie chimique, métallurgique ou encore nucléaire, des centaines de variables sont captées, filtrées et contrôlées par ordinateur. Le secteur du transport est aussi très actif. Après le pilote automatique en aéronautique ou le métro sans conducteur, la conception d’automobiles et le trafic routier sont fortement concernés. Les véhicules autonomes sont indispensables pour poursuivre la conquête de l’espace, des fonds marins ou pour travailler dans des conditions dangereuses. Les télécommunications, nécessaires à un monde globalisé, ne cessent de s’améliorer. Des économies d’énergie peuvent être réalisées, en particulier dans l’habitat. Dans le domaine du vivant, on pallie les défaillances du corps humain par des régulations artificielles ; l’imagerie médicale permet des diagnostics plus sûrs, la robotique médicale apporte une plus grande précision dans les gestes chirurgicaux.
L’automatique et le traitement du signal partagent de nombreux outils mathématiques. Leurs mises en œuvre sont aujourd’hui numériques, c’est-à-dire sous forme d’algorithmes exécutés par un processeur. Les signaux issus de capteurs sont échantillonnés pour être transmis au calculateur. Le résultat de l’algorithme de commande est transmis à un convertisseur numérique-analogique pour faire fonctionner l’actionneur.
Les algorithmes de traitement du signal et d’automatique sont aujourd’hui implantés sur ordinateur. Le signal délivré par le capteur, continu dans le temps, possède une infinité de valeurs possibles. Pour qu’il soit utilisable par l’ordinateur, ces valeurs sont mémorisées à intervalles régulièrement espacés dans le temps (échantillonnage) et converties en binaire (quantification). Ceci est effectué par un circuit électronique, le convertisseur analogique-numérique. À l’inverse, le convertisseur numérique-analogique transforme la commande calculée par l’ordinateur (un nombre) en une tension électrique qui agit sur l’actionneur.
Plus un signal varie rapidement, plus il faut l’échantillonner vite pour ne pas perdre d’information. Le signal analogique, représenté en rouge, correctement échantillonné (à gauche), est reconstruit avec précision. En revanche, si la période d’échantillonnage est trop grande (à droite), la reconstruction est erronée, on retrouve un signal de période beaucoup plus grande que celle du signal réel. Par exemple, sur certains films (images échantillonnant la réalité et reconstruites par l’œil), on peut voir ainsi les roues d’un véhicule tourner à l’envers.
© P. Veyret, CRDP de l’académie de Versailles.
Signal et bruit
Un problème fondamental du traitement du signal est le filtrage, qui consiste à extraire « un signal dans du bruit ». Pour bien comprendre, définissons d’abord ce que l’on entend par « signal » et par « bruit ».
Un signal est la variation d’une grandeur physique porteuse d’une information. Ainsi, un signal acoustique reçu par un microphone est associé aux vibrations de l’air, le signal reçu sur le capteur d’un appareil photo numérique à des rayons lumineux, le signal reçu sur un téléphone mobile à des ondes électromagnétiques. Le domaine de variation du signal peut être le temps comme l’espace. Dans le cas d’une photo, le signal qui correspond à la quantité de lumière et à la couleur change selon deux coordonnées spatiales.
Fréquemment, le signal observable — souvent électrique — est fourni par un capteur. Un microphone transforme le signal acoustique en un signal électrique. Un capteur d’image transforme le signal lumineux en un signal électrique. Une antenne transforme les ondes électromagnétiques en un signal électrique.
Cependant, les capteurs peuvent recevoir simultanément plusieurs signaux et ne sont pas parfaits. Par exemple, en ville, l’antenne d’un téléphone mobile reçoit plusieurs versions atténuées et retardées d’un émetteur, en raison des réflexions multiples des ondes sur les immeubles ; elle reçoit aussi des signaux provenant de plusieurs émetteurs, ainsi que des signaux électromagnétiques émis par le soleil. Le signal reçu est donc une version déformée du signal utile, polluée par des signaux d’autres origines. L’ensemble de ces signaux, sans intérêt pour l’utilisateur, est appelé globalement « bruit ».
Tendre l’oreille
Retrouver le signal utile dans le bruit est assez facile si l’on connaît les caractéristiques du signal utile : c’est le cas en télécommunications où le signal utile, codé par une modulation avec une porteuse de fréquence connue, est très différent du bruit. Cependant, le signal reçu est compliqué à cause des réflexions multiples qui fournissent un mélange : ceci est résolu en « inversant » le mélange, à l’aide d’un algorithme appelé « égaliseur ». Mais tout ne marche pas toujours parfaitement ! Lorsque les réflexions changent très vite, par exemple lorsque l’on se déplace en voiture en ville ou en TGV, le mélange change trop vite pour l’égaliseur ou lorsque l’on est trop loin d’un émetteur, le bruit masque le signal utile, et le téléphone ne fonctionne plus !
Le problème devient plus difficile lorsque le signal utile et le bruit se ressemblent. Par exemple, l’appareil sonar d’un bateau de pêche cherche à localiser les bancs de poissons d’un certain type. Or les signaux acoustiques émis par deux bancs de poissons différents sont très similaires : les différences très faibles sont liées à la taille du banc, à la profondeur, à la taille et aux mouvements des poissons. De plus, le signal reçu par le sonar est perturbé par les signaux acoustiques émis par les autres navires, les sous-marins, les gros mammifères marins, etc.
L’image sans faute
Les appareils photo numériques ont des capteurs de plus en plus grands : jusqu’à 24 millions de pixels en 2012 ! Or il est impossible de réaliser un tel capteur électronique CMOS sans défaut. Pourtant, les photos ne présentent pas de pixels noirs ou blancs qui correspondraient à de tels défauts. En fait, l’image est corrigée par filtrage. Pour éliminer le bruit dû aux défauts du capteur à faible luminosité, la valeur d’un pixel est remplacée par la moyenne des valeurs de ce pixel et des huit pixels voisins.
Dans tous les cas, les méthodes de « débruitage » s’appuient sur la modélisation du système physique qui génère le signal et le bruit. Ainsi, l’égaliseur de votre téléphone mobile est fondé sur un modèle du canal de propagation incluant les trajets multiples dus aux réflexions ; l’algorithme de détection du sonar s’appuie sur un modèle associant propagation des ondes acoustiques dans la mer et propriétés du banc de poissons à détecter ; la correction de l’image de votre appareil photo numérique s’appuie sur un modèle de l’image dans lequel les pixels voisins de l’image sont similaires, alors que les pixels en défaut, peu nombreux, sont répartis aléatoirement.
Segmentation et compression

Une photo et sa version JPEG trop compressée.
On « compresse » une image pour qu’elle occupe moins de place dans la mémoire d’un ordinateur, qu’elle soit plus rapide à envoyer par courriel… pour cela on réduit les données qui la composent mais en se gardant de faire apparaître des défauts qui seraient perceptibles à l’œil humain.
© CRDP de l’académie de Versailles. Photo : A. Chauvet. Montage : P. Raynaud
Les standards JPEG, MPEG ou MP3 exploitent les propriétés de la perception humaine. Dans le format JPEG (Joint Photographic Expert Group), une image est représentée par trois plans : une image d’intensité lumineuse (luminance) et deux images de couleur (chrominance). Comme l’œil humain est très sensible à la luminance mais peu à la chrominance, on échantillonne avec plus de précision l’image de luminance que les images de chrominance, d’où un premier gain en compression. Un autre gain est obtenu en découpant chaque image en petites imagettes de 8 x 8 ou 16 x 16 pixels, et en les quantifiant dans le domaine des fréquences : on regroupe les imagettes en paquets selon leur similarité, chaque imagette d’un paquet étant représentée par l’imagette moyenne du paquet. Cette quantification introduit des erreurs cantonnées dans les hautes fréquences et donc peu perceptibles. Entre l’image originale (à gauche) et l’image compressée (à droite), on perçoit peu de différences sauf au niveau des contours en zoomant les images.
Dans le domaine de la santé, le traitement du signal et des images est utilisé pour extraire l’information des signaux électroencéphalographiques (EEG), d’imagerie en résonance magnétique (IRM) ou pour la reconstruction d’images en échographie. En imagerie satellitaire, il est utilisé pour mieux analyser les images terrestres de l’atmosphère et du sol, des images d’autres planètes ou de l’univers. Une tâche importante est la segmentation, c’est-à-dire la séparation d’un signal ou d’une image en régions associées à des événements différents. Par exemple, sur un électroencéphalogramme, on peut rechercher les portions du signal associées à une pointe épileptique. En imagerie satellitaire, on segmente une image du sol en régions : végétation, rivières, rues, bâtiments, etc. Pour réaliser la segmentation, on associe à chaque région un modèle différent et pour chaque groupe de pixels ou d’échantillons de signal, on détermine le modèle qui explique le mieux l’observation.
Avec le développement d’appareils miniatures capables de jongler avec des sons, des images et des vidéos, le traitement du signal s’intéresse aux problèmes de codage et de compression. Les standards JPEG, MPEG ou MP3 sont des standards qui définissent en particulier la façon dont sont codés et compressés des images, des vidéos et des sons. La compression, au moment du codage, doit permettre à la fois de transmettre plus d’informations par seconde et de stocker plus d’informations dans une mémoire de capacité fixée. Du point de vue de la qualité, après décompression, lors de la phase de décodage, le signal ne doit pas être distordu de façon perceptible par l’oreille ou l’œil humains.
Système et commande
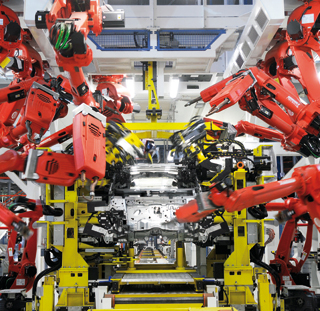
Vue frontale d’une ligne de soudure carrosserie à quatorze robots « Openrobogate Comau ».
Les bras des robots travaillant sur cette voiture sont commandés par des programmes de fonctions logiques. Chaque action répond de manière préétablie à une nouvelle donnée ou vient à la suite de l’action précédente. Tout s’effectue dans un certain ordre. Rien n’est laissé au hasard…
© Comau S.p.A.
Certains systèmes évoluent en mode « discret ». Leurs variables peuvent prendre uniquement deux états (oui/non ; marche/arrêt ; 0/1 dans l’algèbre de Boole). On peut citer l’exemple d’un distributeur de café dont les états sont « présentation d’un récipient, apport de poudre, de sucre et de touillette, écoulement d’eau pendant une durée fixe, arrêt ». Des exemples plus complexes, comme sur la photo, sont constitués par les machines-outils ou les chaînes de montage dans des ateliers mécaniques. Leur commande est fondée sur des fonctions logiques combinatoires des entrées (et, ou, non… et le calcul booléen) ou sur des fonctions logiques séquentielles (fonctions des entrées actuelles et des sorties précédentes, représentations par Grafcet ou réseaux de Petri). Les commandes, initialement mises en œuvre grâce à des transistors, sont maintenant réalisées avec des circuits intégrés ou des automates programmables. Des langages de haut niveau permettent ainsi de programmer facilement des robots.
Un microphone reçoit en entrée un signal acoustique et produit en sortie un signal électrique. Un tel dispositif, soumis à un ou des signaux d’entrée, qui produit un ou des signaux de sortie, s’appelle un système. Ce concept, de fait très abstrait, permet de représenter des dispositifs naturels ou artificiels, parfois très complexes, sous forme de systèmes interconnectés.
Un système complexe est caractérisé par des signaux d’entrées et de sorties. Les entrées sont de deux types : les actions (contrôlables) et les perturbations (non-contrôlables). Les sorties sont les grandeurs auxquelles on s’intéresse. Ainsi une automobile est un système dont les sorties sont sa position sur la route et sa vitesse. On maintient vitesse et trajectoire désirées avec l’accélérateur, le frein et le volant : ce sont les actionneurs produisant les signaux qui contrôlent le véhicule. La commande est manuelle, faite par un humain. La pente de la route et le vent constituent des perturbations. Une représentation symbolique se fait par l’intermédiaire de boîtes (sous-systèmes) et de flèches (signaux). On peut ainsi schématiser un système complexe constitué de sous-systèmes interagissant. La figure représente un système simple (une action, une sortie et deux perturbations) et bouclé. La valeur de l’action est ajustée automatiquement par le régulateur en fonction de la valeur souhaitée pour la sortie (référence). La relation entre les entrées et les sorties fait souvent intervenir le temps, ce qui est modélisé mathématiquement par des équations différentielles.
© P. Veyret, CRDP de l’académie de Versailles.
Dans un système industriel, les entrées sont en général des produits bruts ou de l’énergie et les sorties sont des produits finis. Les objectifs de l’automatique sont de contrôler la qualité et/ou la quantité des sorties, afin de garantir une production améliorée et une meilleure sécurité, malgré les perturbations subies. On parle d’asservissement lorsque l’objectif est d’avoir une sortie qui suit au mieux une référence (par exemple le suivi d’une trajectoire préétablie par un satellite ou par un robot). On parle de régulation lorsque l’objectif est d’avoir une sortie constante malgré des perturbations. C’est ainsi qu’est régulée par exemple la vitesse d’une automobile.
Pour cela, on conçoit un système appelé correcteur ou régulateur qui calcule l’entrée du système à contrôler, appelée alors signal de commande, de façon à régler sa sortie. Par exemple, l’Airbus A380 est contrôlé par un pilote automatique qui remplace le pilote humain. Ce dernier fixe un cap, une vitesse et une altitude : les consignes. Le pilote automatique, informé par de nombreux capteurs, calcule les commandes à appliquer (position des ailerons, puissance délivrée par les réacteurs…). Les experts estiment que grâce au calcul d’une trajectoire parfaite, l’avion consomme 10 % de moins de carburant que dirigé par un pilote chevronné.
Le principe de base de l’automatique est le système bouclé : le correcteur calcule la commande en fonction de la différence entre la valeur désirée pour la sortie (consigne) et sa valeur réelle mesurée par un capteur. On appelle ce signal erreur. Au fur et à mesure que la sortie évolue, que ce soit sous l’effet de la commande ou de perturbations, l’erreur change, le correcteur reçoit cette information en entrée et adapte la commande. On peut comprendre qualitativement le fonctionnement du système bouclé comme ceci :
- si la sortie est égale à sa consigne, l’erreur est nulle, la commande ne varie pas et la sortie reste à sa bonne valeur, sauf s’il se produit une perturbation ;
- si la sortie est inférieure à sa consigne, l’erreur est positive, la commande augmente et donc la sortie augmente, jusqu’à atteindre la bonne valeur ;
- si la sortie est supérieure à sa consigne, l’erreur est négative, la commande diminue et donc la sortie diminue, jusqu’à atteindre la bonne valeur.
Le bouclage peut engendrer des oscillations, si l’erreur est successivement positive puis négative. Les oscillations peuvent s’amortir (comme les rebonds d’une balle) ou au contraire augmenter en amplitude, d’où un problème de stabilité. Le régulateur doit garantir la stabilité du système dans toutes les conditions de fonctionnement. Il faut un certain temps pour que le système bouclé atteigne un régime permanent, c’est son temps de réponse. Par exemple lorsqu’on lance le régulateur de vitesse d’une voiture, on n’atteint pas immédiatement la vitesse de consigne, mais il faut un temps qui dépend entre autres de la puissance du véhicule. La précision caractérise l’écart tolérable entre la consigne et la sortie en régime permanent. Automatique et traitement du signal sont intimement liés dans les situations réalistes. Le signal de sortie mesuré est bruité, on met donc en œuvre le débruitage avant de le transmettre au correcteur. Dans certains asservissements, c’est une image qui permet de connaître la sortie et on utilise le traitement d’image adéquat pour faire fonctionner l’asservissement.
Les tendances

Informatique musicale : répétition d’un concert musicien-ordinateur (avec le logiciel Antescofo).
© Inria / Photo H. Raguet
Au-delà des applications industrielles, de nombreux travaux de recherche sont menés en automatique et traitement du signal. Les défis à relever dans les prochaines années concernent l’étude de signaux et de systèmes très complexes, où des masses de données hétérogènes doivent être analysées en des temps très courts. Ces données seront souvent acquises par des réseaux de capteurs, puis transmises à travers des réseaux informatiques : la dispersion des données, la diversité des chemins sont au cœur des recherches actuelles.
- Foulard C., Flaus J.-M., Jacomino M., Automatique pour les classes préparatoires, cours et exercices corrigés, Hermes, 1997.
- e-Sta, la revue de la Société de l’électricité, de l’électronique et des technologies de l’information et de la communication, onglet « Le kiosque e-STA », « Nouveautés ».
Cet article est paru dans la revue DocSciences n°15 Entre les hommes et les machines : automatique et traitement du signal, éditée par le CRDP de l’Académie de Versailles, en partenariat avec Inria et le CNRS, à l’initiative du comité éditorial d’Interstices.
Newsletter
Le responsable de ce traitement est Inria. En saisissant votre adresse mail, vous consentez à recevoir chaque mois une sélection d'articles et à ce que vos données soient collectées et stockées comme décrit dans notre politique de confidentialité
Niveau de lecture
Aidez-nous à évaluer le niveau de lecture de ce document.
Votre choix a été pris en compte. Merci d'avoir estimé le niveau de ce document !

Sylviane Gentil
Professeur émérite à l’Institut polytechnique de Grenoble et chercheuse en automatique au Gipsa-lab.
Christian Jutten