Traitement d’images pour l’évaluation des ressources forestières
1. Objectifs et méthodologie
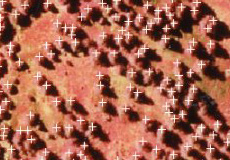
Extraction d’arbres isolés dans les Alpes-Maritimes, France.
© Projet ARIANA/IFN.
Nous présentons ici une approche de géométrie stochastique, que nous avons développée pour extraire des paramètres 2D et 3D des arbres sur des images de forêt.
Afin de modéliser un nombre a priori inconnu d’objets géométriques – ici les houppiers ou cimes des arbres, nous utilisons les processus ponctuels marqués. Cette approche est d’un intérêt particulier car les processus sont définis à la fois par une information a priori, modélisant les objets eux-mêmes ainsi que leurs interactions, et par un terme d’attache aux données qui permet de les placer correctement sur l’image.
Notre méthode, contrairement à d’autres, s’adapte bien à différents types de forêts, plus ou moins denses. Les modèles que nous avons créés s’avèrent efficaces pour extraire les couronnes d’arbres dans différents types de peuplements, et donnent des informations précieuses sur le nombre d’arbres, leur position, la taille de leur couronne et parfois leur hauteur.
Ainsi, des statistiques sur le nombre d’arbres, leur taille ou la densité de la parcelle peuvent être obtenues. Cette connaissance supplémentaire apportée aux inventaires à l’échelle de l’arbre ne serait pas concevable sans l’aide du traitement des images.
Les résultats que nous présentons ont été obtenus sur des photographies aériennes infrarouge couleur fournies par l’Inventaire Forestier National (IFN).
Les forêts de France et leur inventaire
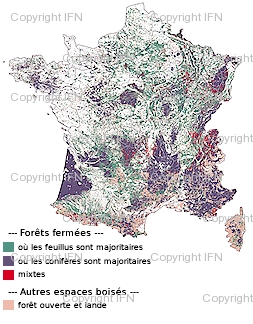
Répartition des forêts en France.
Image : © IFN
En France métropolitaine, les forêts occupent actuellement 28 % du territoire, soit 15 millions d’hectares, et produisent environ 100 millions de m3 de bois par an (chiffres de 2005). Elles sont essentiellement privées (71%), et d’une grande diversité tant du point de vue de leur structure que de leur composition spécifique.
L’Inventaire Forestier National (IFN), créé en 1958, a pour mission d’effectuer l’inventaire permanent des ressources forestières en France. Ceci comprend l’estimation de la surface du couvert forestier, des ressources en bois, par espèces, par types de peuplements et catégories de produits. D’autres objectifs sont liés à des études environnementales.
L’IFN produit principalement des cartes et des statistiques sur les forêts de France. Les cartes comportent par exemple les informations de localisation du peuplement, de la propriété, et du type de structure (taillis, lande, futaie…). Voir le site de l’IFN pour plus de renseignements.
Pour obtenir ces données, l’IFN utilise de façon soutenue des photographies aériennes infrarouge couleur (IRC) : chaque département est ainsi régulièrement survolé, puis exploré par une équipe sur le terrain au niveau de points sol définis par photo-interprétation. Le travail sur le terrain permet de collecter de précieuses informations de dendrométrie mais aussi sur la flore. Les points sol composent un maillage à l’échelle du territoire. Seuls 10% de ces points sont explorés chaque année, ce qui permet d’inférer des résultats statistiques au niveau national, tout en ayant une plus grande réactivité par rapport à des catastrophes naturelles locales comme les feux de forêt ou les tempêtes.
Extraction automatique des paramètres forestiers
Les photographies aériennes infrarouge couleur sont obtenues à partir d’un film sensible au spectre visible et au proche infrarouge, mais utilisé avec un filtre jaune coupant toutes les radiations inférieures à 520 nm. Le proche infrarouge utilisé pour l’étude de la végétation se situe entre 700 nm (limite du spectre visible) et 900 nm environ. L’information apportée par ce film correspond donc aux radiations vertes réfléchies par le sol et traduites en bleu, aux rouges traduites en vert, et à celles dans le proche infrarouge traduites en rouge.
Une fois numérisées à une résolution de 50 cm par pixel, ces photographies sont exploitables par la communauté des traiteurs d’image.
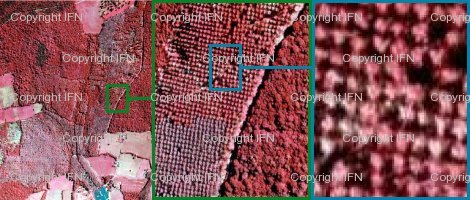
Zooms successifs réalisés sur une image de résolution 50 cm par pixel, pour distinguer les houppiers (ou cimes des arbres).
Image : © IFN
L’objectif est alors de générer des algorithmes qui extraient automatiquement ou semi-automatiquement des paramètres forestiers de l’image. Les images des parcelles sont modélisées comme des réalisations d’un processus ponctuel marqué d’ellipses ou d’ellipsoïdes, dont les points sont les positions des arbres et les marques leurs attributs géométriques. Cette approche peut s’écrire comme un problème de minimisation d’énergie, où l’énergie contient un terme de régularisation (a priori), qui introduit des connaissances sur les objets et leurs interactions, et un terme d’attache aux données, qui positionne correctement les objets dans l’image.

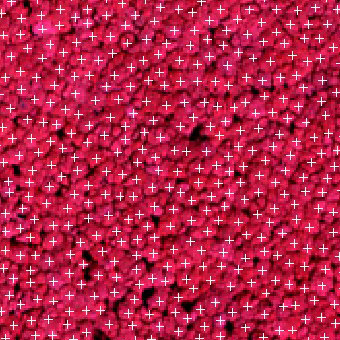
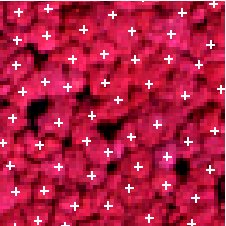
Image de plantation de peupliers sur laquelle la configuration d’objets recherchée est superposée.
© Projet ARIANA/IFN
Dans la suite de ce document, nous détaillons les modèles que nous avons mis au point et quelques résultats obtenus sur différents types de forêts.
2. Les modèles
Nous avons créé un modèle 2D pour extraire les arbres dans des images de végétation dense, ainsi qu’un modèle 3D utilisé pour les images d’arbres isolés.
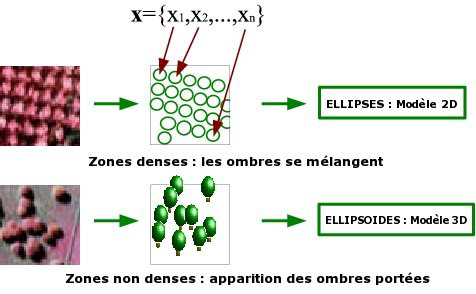
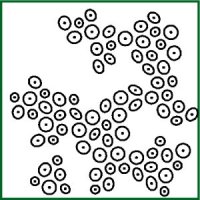
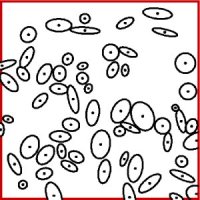
Selon le type de peuplement (dense ou non dense), les objets du processus seront différents.
En effet, les deux informations qui nous aident à extraire les couronnes sont la forte réflectance des arbres dans le proche infrarouge ainsi qu’une zone d’ombre, qui est soit localisée tout autour de la couronne dans les zones denses (ombre propre ainsi que des arbres voisins), soit dans la direction de l’éclairement seulement pour les arbres isolés (ombre portée). Dans ce dernier cas, un modèle 3D est utilisé car il nous permet d’extraire, en plus du diamètre de la couronne et de la position de l’arbre, la hauteur de l’arbre à partir de son ombre.
Les différents modèles d’extraction d’arbres que nous avons créés reposent sur un même fondement mathématique, les processus ponctuels marqués. En géométrie stochastique, ils permettent de modéliser un nombre inconnu a priori d’objets aléatoires. Lorsqu’on applique ce principe au cadre du traitement des images, les objets recherchés sont souvent des objets géométriques (pour diminuer la complexité de l’espace des objets) en interaction dans une scène. Étant donnée la résolution des images de forêts, nous pouvons représenter les cimes par des objets simples (ellipses et ellipsoïdes) et ainsi utiliser cette méthodologie pour incorporer aux modèles d’extraction des informations a priori sur la répartition spatiale des objets notamment.
On mesure la probabilité du processus ponctuel marqué : la configuration qui minimise l’énergie du processus correspond à l’extraction souhaitée.
Soit S un espace objet, les objets pouvant être des ellipses ou des ellipsoïdes. Il s’agit d’un sous-espace de ℝn. Nous appelons configuration d’objets dans S un ensemble non ordonné d’objets. Un processus ponctuel marqué X est alors une variable aléatoire sur l’espace des configurations, c’est-à-dire une configuration aléatoire d’objets eux-mêmes aléatoires. La mesure de probabilité de ce processus ponctuel marqué est définie par sa densité f(x) par rapport à un processus de référence (ici, le processus de référence est un processus de Poisson, c’est-à-dire que les objets sont distribués indépendamment les uns par rapport aux autres, et que leur nombre suit une loi de Poisson). Cette densité dépend de l’énergie du processus, notée U(x).
La formule mathématique correspondante s’écrit ainsi :

La simulation et l’optimisation de ce processus stochastique sont gérés par un algorithme de type Monte Carlo, par chaîne de Markov et par un recuit simulé. Il convient alors de modéliser l’énergie du processus pour que la meilleure configuration soit bien l’extraction recherchée.
L’énergie du modèle est la somme d’un terme de régularisation et d’un terme d’attache aux données :
- le terme de régularisation, ou terme a priori, représente toute la connaissance que nous avons sur les interactions entre les objets (non superposition, alignements, agrégats…), ainsi que les contraintes que nous souhaitons leur imposer (ellipses non plates…).
 |
 |
| À gauche : modélisation d’agrégats dans les configurations d’objets. À droite : les ellipses plates (grande différence entre le grand axe et le petit axe) sont pénalisées. | |
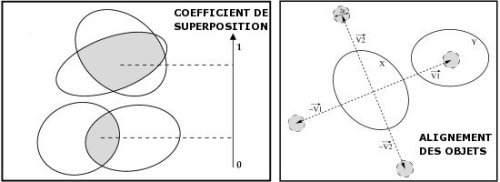
Les intersections entre objets sont pénalisées, tandis que les alignements sont favorisés.
- le terme d’attache aux données est une somme de termes détecteurs pour que chaque objet de la configuration soit bien positionné sur un arbre dans l’image. Un terme détecteur négatif correspond à de « bons objets », tandis qu’un terme positif correspond à de « mauvais objets ».

L’attache aux données est d’autant meilleure (négative) que l’objet est bien situé par rapport aux arbres sur l’image de données.
Le calcul du terme d’attache aux données tient compte du fait que les houppiers présentent une forte réflectance dans la bande proche infrarouge, et que l’on peut les mettre en évidence par le biais de leur ombre. Pour chaque objet du processus, on cherche ainsi à maximiser la différence de teinte entre l’intérieur de l’objet et la zone devant correspondre à son ombre (tout autour du houppier dans le cas de zones de peuplements denses, ou bien dans la direction des rayons du soleil pour les zones non denses).
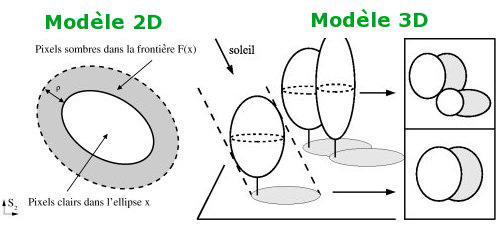
Selon le type de peuplement (dense ou non dense), la zone dans laquelle on recherche l’ombre est tout autour de l’objet (peuplement dense), ou seulement dans la direction des rayons du soleil (peuplement non dense).
Pour cela, le calcul repose sur l’utilisation de la distance de Bhattacharya entre les distributions de niveaux de gris des pixels dans l’objet et de ceux dans la partie ombragée. Cela permet de quantifier la qualité du positionnement des objets.
Bien entendu, cette approche générique d’extraction d’objets géométrique est appliquée à d’autres domaines. Par exemple, en ce qui concerne les formes elliptiques, un projet de détection de flamants roses en vue de leur comptage vient de débuter. Cette approche est également bien adaptée pour extraire des cellules sur des images biologiques. Et des travaux antérieurs ont montré sa pertinence pour l’extraction automatique d’éléments cartographiques tels que les réseaux routiers ou le bâti.
3. Quelques résultats
Les résultats que nous présentons ont été obtenus sur des images infrarouges fournies par l’IFN. Ces résultats sont la propriété du projet ARIANA et de l’IFN et leur droit de reproduction est protégé.
Résultats obtenus avec le modèle 2D
Voici quelques résultats d’extraction obtenus sur des images de plantations de Saône et Loire, et de futaie du Loir-et-Cher.

Extraction d’arbres dans une peupleraie de Saône et Loire, France.
© Projet ARIANA/IFN.
Animation (1 image toutes les 400 000 itérations) relative à l’extraction d’arbres dans une peupleraie de Saône et Loire, France. Le facteur de température du recuit simulé est visible sur la droite.
© Projet ARIANA/IFN.
 |
 |
| Extraction d’arbres dans une futaie régulière du Loir-et-Cher, France. © Projet ARIANA/IFN. |
|
Ces algorithmes proposent des résultats intéressant les inventaires forestiers, puisqu’ils permettent d’améliorer l’estimation de la ressource (meilleure estimation du nombre d’arbres, des classes de dimension des houppiers ou des classes de densité), en opérant automatiquement sur des surfaces bien plus importantes que ce qui serait envisageable de faire par photo-interprétation ou via des équipes sur le terrain. En particulier, le cas des peupleraies est intéressant, puisque le comptage et la localisation des arbres y sont très précis, et donc également le taux de couverture au sol, les orientations privilégiées et les espacements entre les arbres.
Résultats obtenus avec le modèle 3D
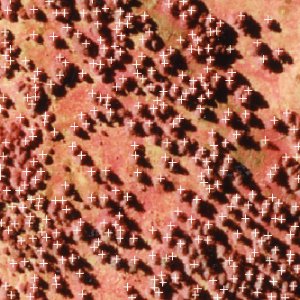
Ici, nous présentons quelques résultats d’extraction obtenus sur trois types d’images sur lesquelles le modèle 3D peut s’appliquer, c’est-à-dire les zones non denses, les arbres du bord des plantations, ainsi que les peuplements mélangés.
Applications du modèle 3D : arbres isolés, bord des plantations ou mélanges taillis futaie.
© Projet ARIANA/IFN.
L’amélioration de l’estimation des volumes sur pied présente un intérêt tout à fait particulier pour les inventaires dans le cadre, par exemple, de demandes à l’échelle de la région forestière. Parfois, le comptage des arbres n’est pas assez précis, mais des statistiques comme le taux de couvert du peuplement sont disponibles, et permettent de classifier le peuplement dans des classes de densité. Pour les peupleraies, l’estimation de la hauteur des arbres permet de remonter à l’estimation des classes d’âge. Une fois la hauteur des arbres du bord de la plantation calculée, une reconstruction 3D de la plantation peut alors être obtenue à l’aide du logiciel AMAP Orchestra, logiciel du CIRAD servant à créer, visualiser et faire évoluer des paysages de plantes virtuelles. Ces résultats donnent des informations supplémentaires intéressantes, comme une estimation du volume de bois sur pied.
La dynamique d’accroissement de la forêt peut aussi être étudiée en comparant les densités obtenues sur la même zone à des temps différents.
Extraction d’arbres isolés dans les Alpes-Maritimes, France.
© Projet ARIANA/IFN.
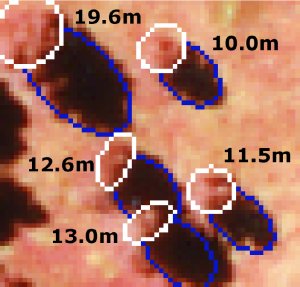
Zoom sur l’extraction, avec la hauteur des arbres détectés.
© Projet ARIANA/IFN.

Reconstruction 3D d’une plantation via le logiciel AMAP Orchestra.
© Projet ARIANA/IFN.
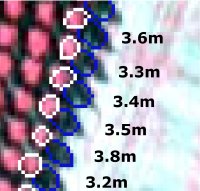 |
 |
| Extraction d’arbres sur le bord d’une plantation, pour estimer la classe de hauteur des peupliers. © Projet ARIANA/IFN. |
|

Extraction des arbres de futaie en zone de mélange taillis futaie.
© Projet ARIANA/IFN.
Les algorithmes que nous proposons sont actuellement testés par l’Inventaire Forestier National. Les résultats obtenus par les modèles sont comparés avec les résultats d’extraction sur le terrain. Cela devrait notamment permettre d’apprécier la précision de la détermination de la taille des arbres par les modèles, de les valider sur d’autres types de peuplements, et de les améliorer encore en fonction des résultats de cette phase d’évaluation. L’IFN pourra ensuite en généraliser l’utilisation, en complément des méthodes de photo-interprétation actuelles. Les inventaires forestiers bénéficieront ainsi de la complémentarité entre les performances de l’analyse visuelle et celles du traitement automatique.
Ce travail correspond essentiellement à la thèse de Guillaume Perrin, co-financée par une bourse de thèse issue du Laboratoire MAS de l’Ecole Centrale Paris, et par le projet ARIANA. Une partie de ce travail a été conduite dans le cadre de l’ARC « Mode de Vie » (qui associe le projet ARIANA et le projet DIGIPLANTE de l’INRIA, le Laboratoire MAS, le LIAMA de l’Académie des Sciences de Chine et l’IFN).
Les auteurs tiennent particulièrement à remercier l’IFN pour la fourniture des données et les discussions intéressantes.
Un livre d’art présente les photographies aériennes infrarouge couleur de l’IFN : Paysages de forêts, aux portes du visible Éditions de Monza, 2003.
Niveau de lecture
Aidez-nous à évaluer le niveau de lecture de ce document.
Votre choix a été pris en compte. Merci d'avoir estimé le niveau de ce document !

Guillaume Perrin
