
Des véhicules plus sûrs et plus propres
Depuis l’avènement de la production de masse dans le secteur automobile, les industriels mènent une quête perpétuelle pour en améliorer la sécurité.
L’insécurité routière est un problème récurrent, dont les conséquences humaines et financières sont très lourdes pour la société. La gravité moyenne des accidents (pourcentage de tués par accident corporel) est en très nette hausse. Améliorer la sécurité routière est donc une préoccupation majeure des acteurs sociétaux et industriels. Cela nécessite bien sûr des contrôles de vitesse, d’alcoolémie… mais bénéficie également des progrès technologiques qui peuvent être réalisés dans le domaine du transport routier. L’amélioration de la qualité des routes ou la gestion du trafic routier font partie des éléments de la solution. Or, il s’avère que plus de 90 % des accidents sont dus à une défaillance du conducteur ; les trois autres facteurs responsables pouvant être principalement le véhicule, la qualité de la route et les conditions météorologiques. La généralisation de l’intelligence au sein de la voiture elle-même sera une des clés du succès pour une meilleure sécurité routière.
Les premières avancées réalisées en termes de sécurité concernaient des éléments qualifiés de « passifs », sans action directe sur la conduite de l’automobile. Parmi eux, on peut citer la mise au point du pare-brise en verre feuilleté. Ce procédé inventé par Édouard Bénédictus en 1903 équipa progressivement l’automobile à partir de 1944, afin de remplacer le verre ordinaire qui causait de très graves blessures au visage lors d’accidents.
Citons encore la ceinture de sécurité, inventée chez Volvo en 1959, vécue comme une véritable contrainte lors de son apparition et dont on ne peut aujourd’hui réfuter l’efficacité. Parmi ces éléments sécuritaires se trouvent également les « airbags ». Il s’agit de coussins se gonflant automatiquement par pyrotechnie à partir de capteurs analysant la décélération, l’assiette du véhicule ou la force de l’impact. Au départ, ces coussins étaient situés entre le conducteur et le volant, puis le passager avant droit fut également équipé pour être protégé du pare-brise. Plus récemment, les airbags latéraux ont fait leur apparition. Ces systèmes sont essentiellement des accessoires de sécurité passive, c’est-à-dire qu’ils agissent avant, pendant et après l’accident pour en atténuer la gravité. Afin d’éviter au maximum l’accident, l’ambition actuelle est de généraliser les systèmes de sécurité active, des systèmes automatiques permettant, grâce à l’acquisition d’informations sur l’état de la voiture, d’agir pour améliorer son comportement et la ramener dans un état normal non critique. C’est ce qu’on appelle une « commande en boucle fermée ».
La sécurité active
Il y a quelques années, le développement massif de l’électronique et de l’informatique embarquées a ouvert la voie à de véritables systèmes d’aide à la conduite. Parmi eux, le plus connu est sans doute le système ABS (anti-blocage des roues), composé de capteurs placés dans les roues du véhicule, qui détectent les amorces de blocages intempestifs et relâchent automatiquement la pression dans le circuit hydraulique afin d’éviter ces derniers. En supprimant les pertes d’adhérence, ce système permet de maintenir le pouvoir directeur du train avant. Le contrôle de la direction est ainsi conservé pour contourner un obstacle tout en gardant la pédale de frein enfoncée.
Plus récemment est apparu le système ESP (électro-stabilisateur programmé) permettant de contrôler dynamiquement la trajectoire du véhicule. Comme tout système automatique, il fait l’acquisition de mesures en temps réel (comme les accélérations au centre de gravité dans toutes les directions) et contrôle les actionneurs permettant d’agir sur le comportement du véhicule. Dans le cas de l’ESP, l’actionneur est le système de freinage actif, autorisant l’ajout d’un couple de freinage indépendamment sur chaque roue. Ainsi, en roulage, la mesure, entre autres, de la vitesse de lacet (mouvement autour de l’axe vertical de la voiture) permet de comparer le comportement de la voiture avec celui d’une voiture idéale, simulée à l’aide d’un modèle mathématique. Les entrées du simulateur sont les mesures en temps réel, comme l’angle du volant, la position de la pédale d’accélération, la position de la pédale de frein, le rapport de boîte de vitesse. Dans les voitures actuellement sur le marché, tout écart au comportement idéal est corrigé à l’aide d’une action sur les freins actifs (donc sur une ou plusieurs roues), ce qui ramène la voiture dans la trajectoire désirée.
Cette commande en boucle fermée doit garantir un retour à la situation normale le plus rapidement possible, quelles que soient les conditions de route. La performance de cette commande, ainsi que sa robustesse vis-à-vis de l’état de la route et des conditions atmosphériques, sont donc des critères prépondérants lors de la synthèse de la loi de commande. Ceci nécessite des outils méthodologiques avancés, fondés sur des modèles assez complexes de la dynamique du véhicule : les caractéristiques de la loi de commande ainsi obtenue sont garanties dans de nombreuses conditions de fonctionnement.
Des voitures plus fiables
Dans le futur, plusieurs systèmes pourront interagir pour modifier la trajectoire de la voiture, comme une action sur la direction du véhicule (grâce à un moteur sur la colonne de direction de la voiture), ou l’utilisation de suspensions actives permettant de rendre la suspension souple ou ferme, et donc d’améliorer la tenue de route de la voiture. Ce sujet de recherche très actuel mène au développement de résultats innovants sur l’estimation de paramètres ou de variables représentant le comportement de la voiture et sur la commande multi-actionneurs / multi-capteurs en vue de ce que l’on appelle le « contrôle global du châssis ». L’utilisation coordonnée des différents actionneurs est un des points difficiles dans la conception de la méthode de commande.
Le contrôle global du châssis est un sujet de recherche très étudié aujourd’hui en automatique. L’objectif est d’utiliser plusieurs actionneurs agissant sur les organes du véhicule (freins, direction et différentiel actifs, suspension semi-active…), afin de permettre au véhicule de réagir à des situations critiques (dues au changement d’état de la route ou à une mauvaise manoeuvre du conducteur) et de revenir à un comportement normal. Il mène au développement de résultats innovants, sur l’identification de paramètres ou de modèles du véhicule, et sur la commande coordonnée multi-actionneurs. Le projet Inove (« une approche intégrée pour l’observation et la commande de la dynamique de véhicules »), financé par l’Agence nationale de la recherche, réunit autour de ce thème des partenaires universitaires et un industriel.
La sécurité pour tous

Véhicule d’essais de l’équipe MIAM du laboratoire Modélisation, intelligence, processus et systèmes de Mulhouse pour l’étude du comportement du véhicule en vue de proposer une conduite automatisée.
De nombreux équipements comme des caméras et des capteurs radars sont intégrés aux voitures pour faciliter la conduite. Ces équipements vont être généralisés sur les voitures afin d’aider les conducteurs et éviter les accidents dont la majorité survient à la suite d’une défaillance du pilote.
© MIPS-MIAM 2013.
De nombreux capteurs peuvent être embarqués pour la mise en œuvre de systèmes d’aide à la conduite. Leur rôle : faciliter la conduite lors de phases de manœuvres. Parmi eux se trouvent les barrières ultrasonores qui équipent maintenant les pare-chocs de la plupart des véhicules neufs. Par messages sonores interposés, elles donnent une indication sur la distance entre le véhicule et un obstacle proche. Certains de ces dispositifs sont couplés à des caméras permettant de représenter, sur un écran intégré au tableau de bord, une vue aérienne du véhicule plongé dans son environnement immédiat, afin de faciliter par exemple les manœuvres de parking. Ces équipements nouveaux ne représentent pas une révolution, mais une amélioration continue et une volonté de démocratiser des technologies longtemps réservées au haut de gamme. Les caméras vont se généraliser et des capteurs radars plus abordables vont élargir l’offre des constructeurs. Ainsi, des travaux de recherche sont menés depuis plus de quinze ans, notamment au sein du groupe de recherche Modélisation et identification en automatique et mécanique (MIAM) du laboratoire MIPS. Validées sur véhicules d’essais, ces recherches contribuent au développement de systèmes intelligents d’aide à la conduite en vue de rendre les véhicules semi-autonomes voire autonomes.
Tous ces systèmes actifs nécessitent des capteurs sophistiqués. Dans les systèmes proposés par les équipementiers, on trouve par exemple un radar couplé à une caméra vidéo afin de réaliser la détection de piétons proches du véhicule et déclencher le freinage automatiquement en cas de traversée inopinée. Ce système contribuera à améliorer la sécurité en ville. D’autres proposent des capteurs dans les rétroviseurs, afin de sécuriser les changements de voie en supprimant les angles morts. Ils pourraient même se substituer aux capteurs à ultrasons pour l’assistance au stationnement. Ces équipements vont devenir de plus en plus abordables, en raison des volumes de production atteints aujourd’hui. Ce phénomène est amplifié par l’ouverture des pays émergents (Brésil, Chine, Inde, Russie) à la sécurité. Les équipements de sécurité seront donc produits en très grands volumes, ce qui permettra de proposer, au plus grand nombre, une sécurité accrue.
Moins polluer pour limiter l’impact néfaste de la voiture sur l’environnement signifie tenter d’éliminer les émissions polluantes dues au moteur à combustion interne : CO2, NOx, HC (dioxyde de carbone, oxyde d’azote, hydrocarbures) et particules. En effet, aujourd’hui les normes européennes sont de plus en plus strictes pour la réduction de ces émissions polluantes. Il est donc nécessaire de concevoir de nouveaux moteurs équipés de systèmes permettant de réduire et de maîtriser les émissions polluantes – du moins, tant qu’il y aura du pétrole sur terre. De nombreux travaux de recherche sont menés en ce sens et concernent des disciplines variées (mécanique, thermique, chimie…). Mais tout le monde s’accorde à dire que la certification des moteurs vis-à-vis des nouvelles normes (de plus en plus drastiques) n’est possible que grâce à l’électronique embarquée, c’est-à-dire grâce à de nombreux capteurs permettant de connaître à tout instant certaines variables caractéristiques du moteur (comme des pressions, températures, débits, ou le régime moteur) et à un pilotage du moteur (donc du processus de combustion) garantissant le meilleur compromis entre performance et pollution. Sont donc étudiés aujourd’hui de nombreux systèmes permettant d’automatiser l’injection de carburant dans les cylindres (afin de garantir la meilleure combustion du mélange air-carburant), la régulation et la maîtrise des gaz d’échappement, l’enfermement des polluants par les pots catalytiques et le diagnostic en ligne de l’état (polluant ou non) du moteur. Ces travaux, par exemple ceux menés à l’Inria au sein de l’équipe de Michel Sorine sont fondés sur des développements de modélisations complexes, mais également sur la mise au point d’estimateurs et de régulateurs qui, coordonnés, doivent mener à un moteur « idéal ».
Moins polluer, c’est-à-dire réduire les émissions de CO2, NOx, HC et particules, est l’objectif majeur que visent les recherches actuelles lors de la conception du moteur de demain. Grâce aux technologies de l’information, de nombreux capteurs permettent de connaître à tout instant des variables caractéristiques du moteur (pressions, températures, débits, ou régime moteur). Le pilotage optimal du moteur peut garantir le meilleur compromis entre performance et pollution. On étudie donc aujourd’hui de nombreux systèmes pour automatiser l’injection de carburant dans les cylindres (afin de garantir la meilleure combustion du mélange air/carburant), pour maîtriser les gaz d’échappement, l’enfermement des polluants par les pots catalytiques et on diagnostique en ligne l’état (polluant ou non) du moteur. Fondés sur des développements de modélisations complexes, mais également sur la mise au point d’estimateurs et de régulateurs, ces solutions mèneront à la conception du moteur « idéal ».
Voiture sans pilote

Deux Cybus circulant sans conducteur, au centre de recherche Inria de Rocquencourt. Un des objectifs de la recherche en automatique est la création de véhicules intelligents pouvant évoluer seuls et transporter des personnes sur de courtes distances, comme ici, le véhicule Cybus.
© Inria / Photo Christian Tourniaire.
Depuis plus de vingt ans, plusieurs laboratoires français travaillent au développement de véhicules autonomes, pouvant circuler sans conducteur tout en ne nécessitant aucune infrastructure spécifique. Après avoir étudié des véhicules individuels, les différentes équipes s’orientent maintenant vers des véhicules répondant au concept d’« ascenseur horizontal ». Ces véhicules électriques automatiques sont destinés à transporter un petit nombre de personnes sur des distances assez courtes. Ainsi, le Cybus (ci-dessus en situation au centre de recherche Inria de Rocquencourt), développé par l’équipe Inria Imara dans le cadre d’un projet européen, a été expérimenté comme navette sur le port de La Rochelle. Autre exemple, le véhicule Vipa, produit par le consortium composé du constructeur automobile Ligier, du bureau d’études Apojee et de l’Institut Pascal, a été présenté en ordre de marche à l’occasion du Challenge Bibendum en mai 2011 à Berlin.
Certains pensent que le maillon faible en matière de sécurité est le conducteur humain. Alors pourquoi ne pas sauter le pas et tenter de supprimer les interventions de ce dernier sur le véhicule ? Actuellement plusieurs équipes de scientifiques au monde travaillent à relever ce défi. Parmi elles se trouvent les ingénieurs de chez Google qui ont développé un véhicule équipé de très nombreux capteurs permettant une reconstruction 3D instantanée de l’environnement, la reconnaissance des panneaux routiers, la détection des obstacles… Ce véhicule est capable de se diriger seul. Il vient d’être autorisé à circuler en mode autonome (sans conducteur) dans l’état du Nevada aux États-Unis. Il est sans doute le précurseur de nos véhicules de demain.
En France, l’Institut Pascal travaille sur ce sujet et a conçu le Vipa. Équipé d’un ordinateur de bord et de deux caméras avec objectif grand angle, une à l’avant et l’autre à l’arrière du véhicule, le Vipa se dirige grâce à sa mémoire visuelle. Ce dispositif de navigation original fonctionne en trois temps.
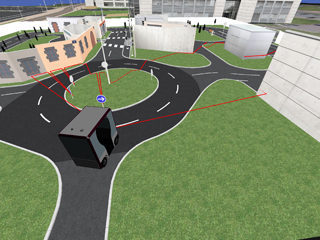
Simulation du véhicule autonome Vipalab à l’aide du logiciel CycabTK Simulator développé par l’équipe Inria e-Motion, dans l’environnement Pavin. La simulation comprend le modèle dynamique et cinématique du véhicule ainsi qu’un télémètre laser situé à l’avant du véhicule. Les véhicules intelligents se déplacent en autonomie grâce à un marquage au sol et des caméras. Ils permettent de transporter des personnes et des marchandises en toute sécurité sur de courtes distances (jusqu’à 1,5 km) en utilisant une énergie « propre ».
Image : e-Motion – Inria / CNRS – Modèle : Institut Pascal – CNRS / Université Blaise Pascal.
La plateforme auvergnate pour les véhicules intelligents (Pavin) permet le test de véhicules autonomes sur le campus universitaire de Clermont-Ferrand. Autonome et sans infrastructure de guidage autre qu’un marquage au sol, le Vipa peut transporter jusqu’à six personnes. Il évolue individuellement et en flotte en présence de piétons, à une vitesse limitée entre 5 et 20 km/h, sur de courtes distances (entre 0,3 et 1,5 km), en autonomie de conduite avec une énergie « propre », en toute sécurité pour les passagers et vis-à-vis des interactions avec l’extérieur. Ces fonctionnalités répondent à des besoins sans solution optimale à ce jour. Il s’agit, par exemple, de la desserte du « dernier kilomètre » dans les espaces publics (liaison parkings et terminaux d’aéroports, parkings et halls de gares), le déplacement sur les sites industriels ou d’activités étendus, la visite automatique de parcs d’attraction, le transport de marchandises (en lieu et place de chariots élévateurs, filoguidés…) et la mobilité en milieu hostile (centrales nucléaires, applications militaires…).
Au cours de la première phase, un chauffeur conduit le véhicule tandis que les caméras embarquées enregistrent les films caractérisant le chemin parcouru. Dans la seconde, l’engin est à l’arrêt et l’ordinateur de bord réalise une analyse des images enregistrées : il repère les « amers » visuels, c’est-à-dire les points les plus significatifs (comme un angle de bâtiment ou une fenêtre), puis les met en correspondance d’une image à l’autre afin de calculer leurs positions dans l’espace. Plusieurs minutes sont actuellement nécessaires pour traiter un parcours de trois kilomètres. L’ordinateur de bord du Vipa construit ainsi automatiquement une carte tridimensionnelle des points remarquables bordant le trajet effectué. Dans la phase finale qui correspond au mode automatique, le véhicule compare les amers visuels perçus par les caméras avec ceux mémorisés durant la phase d’apprentissage, afin de calculer en temps réel la position du véhicule relativement à la trajectoire apprise (à une précision de quelques centimètres). D’autres équipes sont très actives en France sur cette thématique de recherche, entre autres dans les laboratoires Heudiasyc de Compiègne ou d’Inria à Rocquencourt. Rendez-vous dans quelques années pour découvrir si ces voitures sans pilote auront envahi nos villes.
- Gissinger G., Le Fort-Piat N. (Eds), La Voiture intelligente, (Traité IC2, série Systèmes automatisés), Hermes Science, 2002.
- Savaresi S.M., Poussot-Vassal C., Spelta C., Sename O. and Dugard L., Semi-Active Suspension Control Design for Vehicles, Elsevier, Butterworth-Heinmann, 2010.
- Projet mutuel autour de l’observation et la commande de la dynamique de véhicules : Inove (site en anglais)
- Présentation de l’équipe-projet RITS faisant suite à Imara
- Présentation de l’équipe-projet E-Motion
Cet article est paru dans la revue DocSciences n°15 Entre les hommes et les machines : automatique et traitement du signal, éditée par le CRDP de l’Académie de Versailles, en partenariat avec Inria et le CNRS, à l’initiative du comité éditorial d’Interstices.
Niveau de lecture
Aidez-nous à évaluer le niveau de lecture de ce document.
Votre choix a été pris en compte. Merci d'avoir estimé le niveau de ce document !

Michel Dhome
Olivier Sename