
sous licence Creative Commons
Une histoire de la robotique d’aujourd’hui
Petite histoire de la robotique
La robotique est essentiellement une science dont le but premier est d’imprimer des mouvements à un corps solide avec des objectifs précis. Elle est intimement liée à la perception soit du système sur lui même (dite proprioceptive) pour la réalisation correcte du mouvement, soit de l’environnement du robot (perception dite extéroceptive) pour adapter l’action au contexte. Cette perception est réalisée par des capteurs qui vont transformer un phénomène physique en une ou des grandeurs électriques. Un grand changement depuis les années 2000 a été la multiplication des phénomènes physiques qui peuvent être appréhendés par des capteurs avec une très bonne précision et dont, de plus, le coût a considérablement chuté. Ces capteurs fournissent une très large diversité d’informations : imaginez que votre œil puisse percevoir, outre la lumière visible, l’infrarouge qui permet l’évaluation de la température des objets qui vous entourent tout en fonctionnant comme un radar pour vous indiquer précisément où sont ces objets et à quelle distance…

Bras d’un robot chirurgical Da Vinci. Photo de Nimur sur Wikipedia, CC BY-SA 3.0.
À la même époque on a assisté à une évolution très rapide des systèmes permettant la transformation des signaux électriques en valeurs numériques exploitables par un ordinateur et inversement la transformation d’une valeur numérique en signal électrique qui permettra d’utiliser des moteurs pour agir sur l’environnement, le tout accompagné d’une baisse considérable des coûts. La difficulté de la science robotique n’est donc pas la production de données mais leur exploitation pour réaliser/guider le mouvement afin d’atteindre au mieux les objectifs visés. Toujours à la même époque, un mur s’est écroulé : jusqu’alors les robots, essentiellement industriels, évoluaient dans un monde physiquement clos dont l’humain était exclu mais cette barrière a commencé à s’effriter avec, par exemple, l’apparition des robots aspirateurs ou du robot chirurgical Da Vinci.
La robotique aujourd’hui
Pour parler du présent et du futur de la robotique, j’ai choisi d’examiner les titres des 186 sessions de la conférence ICRA de 2023, la plus grande conférence annuelle de robotique, rassemblant plus de 6000 participants. Hors IA (sujet sur lequel nous reviendrons) environ 16 % des sessions sont réservées à des applications spécifiques de la robotique en constante évolution (industrie, médical, transport, agriculture, aérien, maritime, espace, art, assistance aux personnes, etc.) et qui montrent bien la pénétration de la robotique dans tous les domaines, favorisée par des coûts matériels en baisse et une plus grande facilité d’utilisation. Ces applications ne peuvent exister qu’en s’appuyant sur des fondamentaux : le traitement des données pour obtenir les informations pertinentes (14 % des sessions), la mécanique utilisée pour le mouvement et leur étude (14 %), l’automatique (11 %), la réalisation de tâches complexes (comme saisie, génération de trajectoires… 13 % des sessions), le reste des sessions se répartissant sur des sujets plus spécifiques comme, par exemple l’informatique, la sécurité ou encore la relation humain-robot. Comme on peut le constater, il existe — en dehors des sujets qui font le buzz de la robotique (IA et certaines applications) — un corpus très important d’autres sujets de recherche dont la pérennité dans la conférence montre qu’ils sont essentiels. Une place à part doit être faite à l’IA, faisant l’objet de 15 % des sessions : c’est un domaine dont l’apparition en robotique a été périodique depuis les années 1990 mais qui est monté en puissance ces dernières années. L’IA a incontestablement un rôle majeur dans certains domaines comme la vision par ordinateur, une modalité de perception très souvent utilisée en robotique sans être omniprésente. Tout au long de cet article, nous examinerons les autres utilisations de l’IA, son rôle exact, ses promesses et ses limites, en gardant à l’esprit que l’on ne peut pas noyer la robotique dans l’IA et réciproquement.
IA et robotique : des enjeux complexes
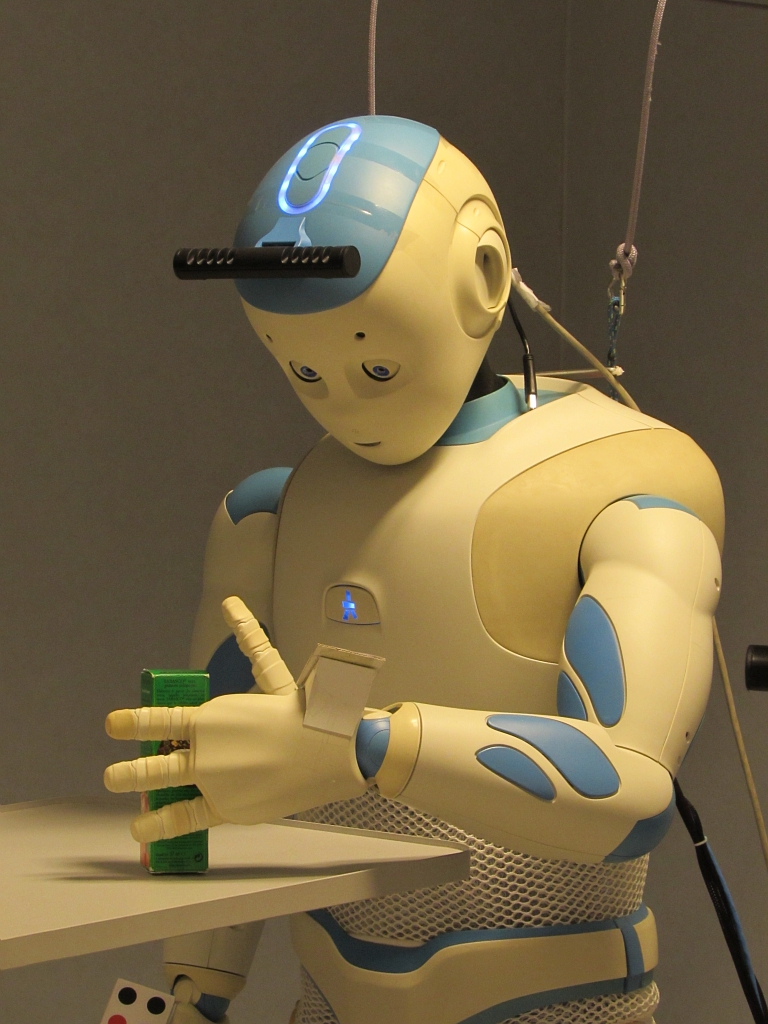
Romeo est un robot humanoïde développé par la société Aldebaran Robotics qui vise à être un véritable assistant et compagnon personnel. En septembre 2014, Lagadic a été le premier des quatre laboratoires européens à être équipé de Romeo. À partir de travaux en asservissement visuel et en suivi visuel, l’équipe a développé une première expérimentation de saisie d’un objet afin de le donner à un humain. Crédit : © Inria / Photo A. Lacouchie.
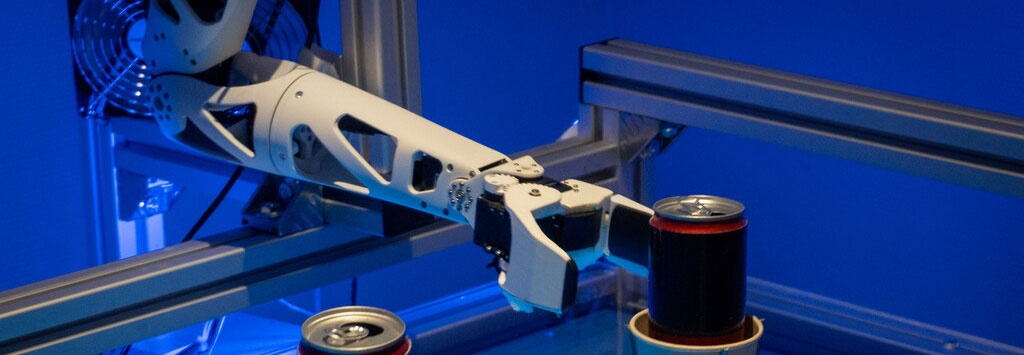
L’autonomie est un sujet majeur en robotique puisque dans certains contextes le robot doit pouvoir réagir rapidement à des changements de son environnement qu’il perçoit via ses capteurs, par exemple une voiture électrique ou un rover spatial sur Mars. Dès que le robot évolue dans un environnement un peu complexe il devient impossible de programmer l’ensemble des réactions possibles face à un changement de contexte. Par exemple la prise d’un objet par un robot dépend de la forme et la position de l’objet, de sa fragilité, de sa texture, etc. : un axe actuel de recherche est d’entraîner une IA avec quelques exemples de prise en espérant qu’elle pourra générer par la suite une stratégie de prise adaptée à d’autres objets. Mais on reste dans le spécifique et pour aller vers l’autonomie il faudrait bien plus de généricité comme, par exemple, avoir une IA qui pourrait gérer à la fois la prise d’objet, ouvrir un placard ou une porte quel que soit son mode de fonctionnement et bien d’autres tâches. L’IA en robotique est encore actuellement cantonnée à des utilisations spécifiques où elle peut apporter effectivement un plus car sa généricité reste pour le moment limitée vis-à-vis des besoins de la robotique. De plus l’autonomisation se heurte toujours aux limites des capacités des robots car, ne rêvons pas trop, IA ou pas, le temps où un robot pourra saisir n’importe quel vêtement pour aider une personne âgée à s’habiller est encore lointain.
L’évolution vers l’humain prend de l’ampleur par exemple avec les cobots (où humain et robot collaborent en interaction proche pour réaliser des tâches particulières) ou la robotique dite de service, d’assistance ou la robotique sociale. L’introduction de l’humain dans la boucle pose toutefois des problèmes complexes de sécurité, de détermination des intentions réelles de l’humain et introduit une variabilité importante du contexte auquel le robot doit s’adapter, y compris dans ses comportements lors des interactions robot/humain. Il faudrait aussi parler des problèmes d’acceptation de nature très variable selon les individus, les cultures et les sociétés. L’IA est déjà partiellement utilisée pour gérer l’interaction humain/robot (par exemple via la détection d’émotions humaines pour adapter le comportement du robot). Mais l’arrivée de l’IA générative pose des questions encore non résolues : quels en seraient les avantages et les inconvénients dans le cadre de l’interaction robot/humain, par exemple en robotique sociale ?
Ces usages de l’IA posent des problèmes éthiques qui font l’objet de discussions, parfois vives, dans la communauté robotique mais aussi juridique, problèmes qui vont varier selon les domaines d’application. Par exemple l’IA dans les transports ou la robotique d’assistance à la personne posent plutôt des problèmes de responsabilité qui peuvent être atténués par des limites dans l’utilisation ou dans les objectifs visés. Mais ils sont très épineux en robotique sociale avec le risque mentionné par le psychiatre et docteur en psychologie Serge Tisseron[1] que l’humain attribue des sentiments à ce qui reste en dépit de tout une machine algorithmique qui en est dénuée, ce qui ouvre la porte à des manipulations éthiquement très discutables. Et dans tous les cas se pose la question de la pertinence des services proposés alors que les sujets (et leurs familles) ne disposent pas d’une aide indépendante qui pourrait les éclairer dans leurs choix de ces dispositifs très technologiques. Dans d’autres cas, comme les drones militaires, c’est l’absence d’humain qui pose de sérieux problèmes d’éthique.
Focus sur les principaux axes de recherche
La relation avec les humains, et le monde vivant en général, a engendré des axes de recherche divers sur la mécanique même des robots. Traditionnellement les robots sont constitués de corps rigides articulés dont l’objectif est de permettre des mouvements de leur main (ces bras peuvent être embarqués sur des plates-formes mobiles à roues, chenilles… pour élargir leur domaine d’action) avec des architectures mécaniques très peu diverses (typiquement ressemblant à un bras humain).
Un premier axe de recherche est d’examiner les architectures mécaniques du vivant, bien plus diverses, et de s’en inspirer pour élaborer des robots, dit biomimétiques, pour se propulser et manipuler. Certains chercheurs ont même proposé d’utiliser de l’IA pour élargir le panel des possibles : toutefois entre une idée fonctionnelle de mécanique de robot et une réalisation effective il y a un fossé de problèmes théoriques et technologiques à résoudre, ce pour quoi l’IA n’est actuellement pas armée.
Un autre axe de recherche de ce thème est lié au problème de la sécurité d’un humain évoluant en proximité immédiate d’un robot rigide susceptible de se déplacer à grande vitesse. Ce problème a motivé la conception de robots constitués de corps flexibles (par exemple des câbles) ou mous (dit soft robot), ce qui réduit fortement les conséquences physiques d’une collision avec le robot. Toutefois si ce domaine en émergence, qui implique des modèles complexes, a produit des prototypes intéressants il n’a pas encore atteint le même niveau de maturité théorique que les robots à corps rigides qui a fortement bénéficié des progrès de la géométrie algébrique et des méthodes numériques.
Ceci pose le problème de la nécessité des modèles en robotique. Traditionnellement les roboticiennes et roboticiens commencent par écrire des équations mathématiques censées décrire le comportement physique d’un système mécanique avant d’en étudier le comportement. Une autre école est d’obtenir une multitude de données sur le robot et de se passer de modèle en utilisant une IA. À mon sens c’est oublier que l’obtention des données est fastidieuse et qu’un robot un peu complexe possède une multitude de modes de fonctionnement. Dans l’état actuel, il ne semble pas qu’une IA recevant en vrac des données non structurées, bruitées et incomplètes pourra s’adapter à ces modes, ni puisse dépasser un cadre purement numérique pour fournir des analyses plus conceptuelles. Une approche probablement plus réaliste est d’utiliser les modèles pour créer des données structurées que l’IA pourrait, éventuellement, gérer.
Robotique et impact environnemental

Dans cette arène de vol (espace intérieur), quatre drones (unmanned aerial vehicle – UAV) quadricoptères Mikrokopter peuvent voler de façon autonome (sans pilote).
Leurs déplacements sont analysés par des caméras de capture de mouvement Qualisys permettant l’analyse temps-réel du mouvement.
© Inria / Images G. Destombes
Parlons maintenant d’environnement en commençant par l’énergie consommée par un robot. Tout d’abord il faut savoir que c’est parfois un facteur limitatif : par exemple les robots humanoïdes, merveilleux outils de recherche, ont une autonomie énergétique très limitée (un NAO ne peut fonctionner que 60 minutes) ce qui, outre leur coût très élevé, en limite fortement les utilisations pratiques. C’est aussi le cas des drones civils dont le coût faible permet d’envisager l’utilisation en flottille, ce qui est d’ailleurs un sujet de recherche. Des recherches portent aussi sur la consommation énergétique des robots industriels classiques qui n’ont pas un bon rendement : par exemple ils consomment de l’énergie juste pour rester en position, sans bouger, et pour bon nombre de tâches ils utilisent un ordinateur et des cartes électroniques largement surdimensionnées par rapport aux besoins. Un axe de ces recherches est d’adopter une architecture mécanique plus efficace et de se passer du numérique pour l’utilisation du robot via une programmation électromécanique, réservant le numérique à la conception dans le but de fournir des bonnes possibilités d’adaptation et de programmation du robot. On construit ainsi un système moins gourmand en énergie, plus facilement réparable et recyclable tout en diminuant fortement l’usage de ressources pour son électronique : le futur de la robotique pour certaines utilisations est peut-être de développer une version moderne des automates de Vaucanson ! La robotique peut aussi être utilisée pour suivre finement l’évolution d’environnements naturels et détecter des pollutions diverses. Enfin un axe apparu dès les années 1980 et qui revient périodiquement est la robotique agricole pour des tâches comme la cueillette et le désherbage afin de diminuer l’utilisation d’intrants chimiques : c’est un axe difficile car assurer une bonne mobilité du robot dans un champ n’est évidemment pas simple et le robot doit être très flexible pour s’adapter à des cultures différentes.
En conclusion la robotique est un domaine toujours en évolution que ce soit du point de vue matériel, théorique et des applications et elle est interdisciplinaire par essence. Sa nouvelle proximité avec l’humain a imposé de plus un rapprochement avec d’autres communautés comme, par exemple, les médecins et divers domaines des SHS. Le numérique y tient évidemment un rôle très important même s’il peut paraître parfois important de le placer dans un rôle amont car un robot reste fondamentalement analogique. Quant à l’IA, elle peut bénéficier des problématiques robotiques pour évoluer, même si pour ce faire il convient d’être très conscient des contraintes imposées par le fonctionnement d’un robot. Réciproquement un usage raisonné de l’IA peut la placer comme un outil supplémentaire d’analyse qui pourra parfois être plus efficace que des méthodes plus installées mais dont on parle peu.
[1] Livres de Serge Tisseron, Empathies et manipulation (2020) et Le jour où mon robot m’aimera (2015), parus aux Éditions Albin Michel.
Niveau de lecture
Aidez-nous à évaluer le niveau de lecture de ce document.
Votre choix a été pris en compte. Merci d'avoir estimé le niveau de ce document !