

sous licence Creative Commons
Etude du comportement piéton en réalité virtuelle
La marche est le moyen de locomotion par excellence, ne requérant aucun matériel spécifique à part peut-être une bonne paire de chaussures quand elle est pratiquée intensément. La très grande majorité d’entre nous possède une vie quotidienne de piéton. Cette activité est primordiale et dit beaucoup de nous. Nos intentions, nos émotions, notre humeur ou notre personnalité transparaissent dans nos mouvements et nos trajectoires de marche. Se déplacer seul ou avec des amis, de jour ou dans la pénombre, être stressé ou détendu, connaître les lieux ou les découvrir, être jeune ou âgé, être sourd ou malvoyant, sont autant de causes directes et indépendantes qui viennent modifier la façon dont nous nous déplaçons, et ainsi, les caractéristiques de nos trajets.
Modéliser comment nous marchons
La compréhension et la modélisation du comportement piéton conduisent à la construction d’une représentation mathématique du processus par lequel nous formons nos trajectoires. Cette représentation a des applications très importantes. En effet, disposer d’un modèle de comportement piéton permet la simulation de piétons, et par extension la simulation de foule. Ces simulateurs permettent de prédire comment des piétons utilisent un espace public, dans le but d’en valider l’architecture, le niveau de confort ou la sécurité pour ses usagers. Aujourd’hui, des simulateurs de foule sont mis en œuvre pour la conception des plus grands navires, stades, salles de concert, parcs à thème ou gares ferroviaires. Ils sont utilisés par exemple pour vérifier que l’évacuation des bâtiments est possible en un temps limité, en fonction du nombre et de la disposition des points de sortie.
Les simulateurs sont capables de calculer les trajectoires que chacun de nous pourrait suivre, en fonction de nos destinations et de l’aménagement de l’espace. Mais ils restent très loin de capter toutes les finesses du comportement piéton, dont l’effet des facteurs individuels ou situationnels cités plus haut, ce qui limite leur capacité de prédiction. Par exemple, comment un temps d’évacuation évolue-t-il en fonction de l’âge moyen des usagers ? Est-il allongé ou diminué en présence d’enfants ? Le stress a-t-il un effet positif ou négatif ? Quels sont les effets de la connaissance des lieux ou d’un éventuel entraînement préalable ? La réponse à ces questions est aujourd’hui empirique. La méthode consiste à réunir des groupes de participants, leur donner des instructions de déplacement, mesurer les caractéristiques du mouvement résultant et comparer ces mouvements quand ils sont réalisés dans des conditions différentes. De telles expériences ont lieu régulièrement à travers le monde et à chacune correspondent un coût et un temps non négligeables. Mais alors que le nombre de facteurs qui jouent sur chaque comportement piéton est grand, et que s’ajoutent leurs possibles interactions, le nombre d’expériences qui seraient nécessaires pour observer toutes les situations dignes d’intérêt est tout simplement gigantesque.
Expérimentations en réalité virtuelle
Dans ce cadre, la réalité virtuelle ouvre de grandes perspectives pour relever le défi de la modélisation du comportement piéton. Pourquoi ? Rappelons en premier lieu que la réalité virtuelle consiste à utiliser des technologies immersives pour exciter les sens d’un utilisateur et lui rendre perceptible un monde numérique qui n’existe pas réellement. Elle permet donc de contrôler finement l’univers qui entoure un utilisateur. Ainsi, elle permet de moduler automatiquement un grand nombre des facteurs qui jouent sur les comportements piétons un par un et de manière précise. Il est également possible de manipuler la perception des sujets, comme par exemple fausser des informations de distance ou de mouvement, pour creuser plus encore le rôle de ces variables sur le contrôle de la locomotion. Il est possible d’observer les réactions d’un seul participant dans une foule virtuelle, évitant le recrutement de nombreuses personnes. Il est possible également de répliquer fidèlement les mêmes conditions pour plusieurs participants successifs, éventuellement de répliquer facilement une même expérience dans différents endroits du monde – car les facteurs culturels sont très importants et comparer des populations d’origine différente a du sens. La réalité virtuelle facilite enfin la mesure des trajets car ils sont réalisés dans un environnement simulé où tout est connu. Au-delà du fait que l’accès à tout ce qui est perçu par le participant est généré, et donc accessible à l’expérimentateur, équiper le sujet avec des capteurs de toute sorte est largement facilité.
Par exemple, il est assez facilement possible d’observer l’effet de l’aménagement d’une gare – comme les conditions d’éclairage, la disposition d’obstacles, la présence et la disposition d’une signalisation – sur le comportement d’usagers. Dans une certaine mesure, ceci est également possible dans la réalité, mais à un coût élevé lié à la logistique nécessaire. La sécurité des participants est aussi en jeu quand des situations de danger potentiel sont étudiées. En résumé, la réalité virtuelle facilite grandement les observations, accélère le rythme des études, et permet des manipulations qui sont parfois impossibles à réaliser dans des expériences réelles. Et dans le cadre de l’étude du comportement piéton, elle nous permet donc d’abord de définir des situations « numériques » standard, répétables à l’identique et à l’infini, d’y exposer autant de sujets que nous souhaitons, d’observer autant de trajets réalisés toujours strictement dans les mêmes conditions. Cela permet de savoir si les comportements sont stéréotypiques ou fortement soumis à la variabilité intra ou inter individuelle. Ainsi la réalité virtuelle est un outil très puissant pour répondre à des questions fondamentales pour le modélisateur, en garantissant une immersion dans des contextes écologiques, c’est-à-dire se rapprochant de la vie quotidienne. C’est ainsi que la plate-forme de réalité virtuelle Immersia s’est retrouvée un lieu central pour l’étude du comportement piéton à quelques occasions !

Le plateau technique Immerstar est un dispositif de réalité virtuelle immersive de type CAVE (pour Cave Automatic Computer Environment) qui se situe sur le campus de Beaulieu à Rennes. Un CAVE se compose en premier lieu d’une grande surface de projection. Celle d’Immerstar se compose de quatre écrans rectangulaires qui entourent l’utilisateur. Un très grand écran d’environ 9mx3m lui fait face, fermé par deux écrans latéraux d’environ 3mx3m et enfin un écran au sol. À l’exception de ce dernier, les écrans sont semi-transparents et permettent une projection par l’arrière évitant les problèmes d’ombres projetées de l’utilisateur. Immerstar permet la projection d’images en stéréovision active, c’est-à-dire que la sensation de profondeur est donnée à l’utilisateur en lui projetant successivement des images destinées à l’œil gauche et à l’œil droit. Ce dernier porte des lunettes qui masquent la vue de l’œil gauche ou droit de manière synchronisée, permettant la perception distincte des images destinées à chaque œil. Ces images projetées sont calculées par un ordinateur aux performances graphiques poussées. Le plateau est également équipé d’un système de capture de mouvement permettant par exemple d’enregistrer les gestes de l’utilisateur, mais aussi la position de sa tête, essentielle pour le calcul des images perçues.
La première expérience « piéton » menée en 2015 grâce à Immersia a consisté à observer comment nous, piétons, nous comportons face à un groupe d’individus : le traversons-nous ? ou le contournons-nous ? Cette question est importante pour comprendre comment les changements de densité dans la foule (et la présence de groupes plus compacts) affectent nos décisions de navigation et nos trajets. Une hypothèse est que cette décision est prise sur la base de la dépense énergétique que représente le trajet de traversée, sujet à des interactions plus fortes avec les individus du groupe, ou le trajet de contournement, qui, lui, est généralement plus long, comme illustré par la Figure 1. Cela dépend fortement de la densité et de la taille des groupes en question : à quel moment la somme des petits ajustements de trajectoire nécessaires pour éviter successivement les membres d’un groupe lors de sa traversée devient-elle plus coûteuse que la distance à couvrir pour contourner un groupe ?
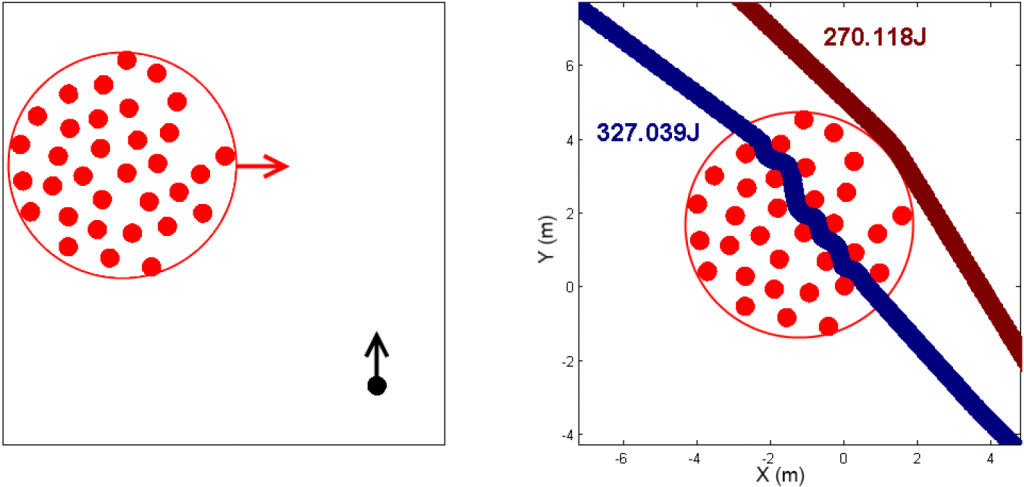
Figure 1 – Trajectoires de traversée ou de contournement d’un groupe
À gauche, la position vue de dessus d’un piéton se déplaçant vers le haut qui croise un groupe, en rouge, se déplaçant vers la droite. À droite, le même groupe en rouge, une simulation de trajet de traversée du groupe, en bleu, et de contournement du groupe, en marron. Les coûts énergétiques respectifs sont indiqués pour cet exemple. La traversée est plus courte mais sujette à de nombreuses adaptations de la trajectoire pour éviter les collisions et résulte en une plus grande dépense énergétique.
Pour confirmer cette hypothèse, un simulateur a été utilisé en premier lieu pour générer et comparer le coût des trajets de contournement et des trajets de traversée de groupes. Ces comparaisons ont pris en compte l’effet de la taille et de la densité des groupes. Dans un deuxième temps les couples de densité et de taille critiques pour lesquels s’effectue une bascule du moindre coût entre traversée et contournement ont été déterminés. Enfin dans un troisième temps, une expérience en réalité virtuelle a vérifié que des sujets humains opèrent une bascule entre leur choix de traverser ou contourner un groupe pour les mêmes valeurs critiques.
Le coût énergétique d’un trajet résulte de la somme de l’énergie musculaire dépensée pour activer nos membres et les mettre en mouvement. Cette grandeur est donc difficilement accessible, il faudrait mesurer précisément l’activité de chaque muscle. Nous préférons donc utiliser un modèle approximatif mais admis par la communauté qui estime le coût énergétique d’un trajet par la formule suivante :
\( E = m \int (e_s + e_w |v|^2) dt\)
où \(E\) est l’énergie du trajet, \(m\) la masse du corps, \(v\) sa vitesse instantanée et enfin \(e_s\) et \(e_w\) sont deux constantes (estimées dans des travaux précédents à une valeur moyenne de \(e_s= 2.23\) et \(e_w = 1.26 \mathrm{J} \ \mathrm{Kg}^{-1} \mathrm{s}^{-1}\) ). Cette formule pénalise les trajets de durée plus longue (du fait de l’intégrale sur le temps de trajet) et ceux effectués à des vitesses plus élevées pour une même durée. Dans nos comparaisons de trajets différents mais toujours effectués entre deux mêmes points initiaux et finaux, et du fait de la relation qui existe entre vitesse, longueur et durée d’un trajet, ce calcul va nous permettre de mettre en balance le rallongement d’un trajet de contournement par rapport aux ralentissements liés aux manœuvres locales d’évitement qui viennent rallonger la durée d’un trajet.
La Figure 2 montre les résultats de la première partie de cette étude. Cette figure rend compte du coût énergétique du trajet du marcheur selon qu’il contourne le groupe (à gauche) ou le traverse (à droite). Le code couleur indique la valeur de la dépense énergétique, plus faible en bleu et plus élevée en rouge, tandis que les axes nous donnent des informations sur la taille du groupe (de forme circulaire, dont la taille est exprimée selon la valeur du rayon de ce cercle) et la densité (exprimée par la distance moyenne séparant les différents membres du groupe). Il n’est pas surprenant de voir que le coût du trajet de contournement croît avec la taille du groupe, alors que celui du trajet de traversée dépend en premier lieu de sa densité, en deuxième de sa taille. Mais ce qui est plus intéressant est montré au centre de la figure : le coût comparé des deux trajets. D’une manière générale, au-delà d’une valeur de 1,5 mètre de distance de séparation entre les membres du groupe, il est plus avantageux de le traverser. Cela fluctue selon la taille du groupe. En regardant plus précisément le cas de groupes de 3 mètres de rayon, l’hypothèse « énergétique » revient à dire que si la densité du groupe est telle qu’environ 1,6 mètre sépare au moins deux membres voisins du groupe, alors il est moins coûteux de traverser le groupe. Au contraire, si les membres du groupe sont séparés de moins de 1,5 mètre, alors il est moins coûteux de le contourner. Entre les deux, ces coûts ne peuvent être distingués de manière sûre. En effet, l’expérience en simulation est répétée de nombreuses fois en y ajoutant de l’aléa pour éviter les effets d’une disposition particulière du groupe. Des tests statistiques estiment si les différences observées entre conditions sont significatives ou non.
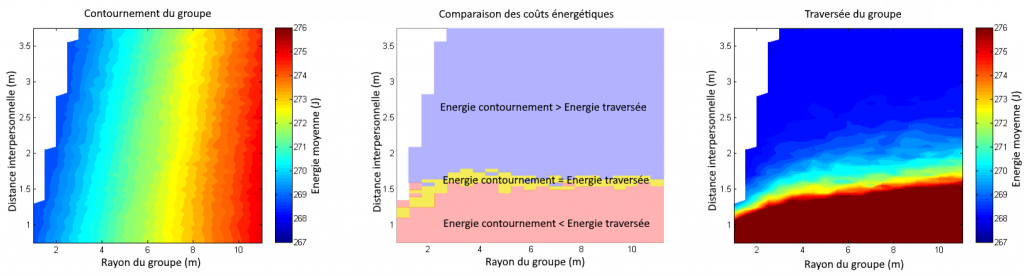
Figure 2 – Résultat de l’étude en simulation comparant les coûts énergétiques de trajets de contournement et de traversées de groupes
À gauche, coût des trajets de contournement en fonction de la densité du groupe (exprimée en distance moyenne entre individus du groupe) et taille du groupe (rayon du groupe de forme circulaire). Les valeurs bleues (respectivement rouge) correspondent à des trajets moins coûteux (respectivement plus coûteux). À droite, même tracé pour les trajets de traversées. Au centre, comparaison des coûts de trajets de traversée ou de contournement, en violet (respectivement en rose pâle) situations où le coût de traversée est moindre (respectivement supérieur) par rapport au contournement. En jaune, les coûts sont indistincts.
L’hypothèse était-elle juste ? Les humains font-ils cette bascule entre contournement et traversée aux valeurs trouvées ? La réalité virtuelle permet d’y répondre en plaçant des sujets dans la situation d’éviter un groupe de 3 mètres de rayon. L’observation corrobore l’hypothèse ! En effet, pour des groupes peu denses avec plus de 2 mètres entre individus, plus de 80% des sujets décident de le traverser. Dans le cas contraire, moins de 1,1 mètre entre individus, plus de 80% des sujets décident de le contourner. La bascule critique se produit entre 1,4 (environ 60% de contournement) et 1,7 mètre de distance entre individus (environ 60% de traversée). Un échantillonnage plus fin de ces distances n’a pas été réalisé car il aurait rendu les expériences trop longues pour les sujets. Cependant, si le seul critère énergétique avait compté dans cette décision, une bascule franche autour de ces valeurs critiques aurait été observée. Alors pourquoi une transition plus progressive est-elle observée ? Les explications possibles sont nombreuses : le calcul des coûts énergétiques en simulation est approximatif, il y a aussi beaucoup de variabilité dans le comportement humain, d’autres facteurs individuels peuvent influer, etc. Mais le rôle du coût du trajet dans la décision que les sujets ont prise est indéniable, et ce résultat peut être utilisé directement pour renforcer le réalisme de modèles de simulation.
Retour à la réalité
Toutefois, une question d’un autre ordre s’impose. Pouvons-nous garantir que les comportements que nous avons observés en réalité virtuelle sont conformes à la réalité ? Les sujets auraient-ils eu les mêmes trajectoires face à des groupes réels ? Il y a toutes les raisons de penser que la réponse est, a priori, non. Pourquoi ? La formation d’une trajectoire locomotrice peut s’inscrire dans une boucle « perception-action » dans laquelle un marcheur prélève des informations, principalement visuelles, dans son environnement pour effectuer un contrôle de ses mouvements qui permet son déplacement, ce déplacement modifiant alors les éléments perçus. Or, ces deux éléments principaux, perception visuelle et mouvement, peuvent être largement faussés en réalité virtuelle. Par exemple, il est démontré que la perception des distances est faussée : dans une scène virtuelle mise à l’échelle, les objets virtuels sont perçus plus proches qu’ils ne le sont. Par ailleurs, la salle Immersia, bien que de grandes dimensions, ne permet pas de se déplacer en marchant dans les environnements virtuels sur de grandes distances : les sujets risqueraient de percuter les écrans d’affichage. Ils ont recours pour se déplacer à des interfaces en utilisant, par exemple, joysticks, claviers, souris, ou autres technologies dédiées.
Bien sûr, cette question doit être abordée préalablement à toute expérience en réalité virtuelle, par exemple en comparant les mêmes tâches de locomotion réalisées dans des conditions réelles ou virtuelles. De nombreuses études parviennent à la même conclusion. Quelle que soit la nature de cette tâche, quelles que soient les technologies de réalité virtuelle employées (pour se mouvoir, pour visualiser la scène), les sujets forment des trajectoires très similaires entre conditions réelles et virtuelles. Comme si, au final, c’était le trajet perçu qui comptait et non les muscles impliqués pour le réaliser. Cependant les trajectoires diffèrent quantitativement. Par exemple, des distances plus grandes aux obstacles sont préservées, et en particulier aux personnages virtuels. Ceci est sans doute lié à la fausse perception des distances. Quoi qu’il en soit, bonne nouvelle, les résultats des études du comportement piéton en réalité virtuelle sont en grande partie transposables à la réalité.
Conclusion
Aujourd’hui, ces recherches continuent et nous portent dans Immersia sur l’étude couplée du regard et de la trajectoire, dans l’idée d’analyser de manière conjointe l’information visuelle prélevée sur l’environnement et la trajectoire qui en résulte. Par exemple, le comportement du regard peut nous informer sur la source d’influence d’une trajectoire. Il est montré par exemple que, lors de la marche dans un environnement peuplé, le regard se porte plus fréquemment sur les personnes qui risquent de provoquer une collision avec nous. Cela indique dans une foule, parmi un très grand nombre de possibilités, qui en particulier viendrait provoquer des ajustements de nos trajectoires. Ces résultats sont très utiles pour des questions de modélisation. Dans ce cadre, un très grand intérêt de la réalité virtuelle est de faciliter non seulement la mesure de l’activité du regard (les visiocasques, même à bas prix, sont maintenant souvent équipés de cette mesure) mais aussi la nature des objets regardés, car ils sont connus par définition du monde virtuel qui est simulé. Sur la base de ces technologies, nous ouvrons un nouveau champ des possibles pour traiter du très grand nombre de questions qui restent sans réponse quant au comportement piéton. Par exemple, à l’heure où les modes de transport doux sont amenés à se développer, comprendre les subtilités des interactions entre piétons et autres vélos et trottinettes permettra sans doute un partage plus intelligent de l’espace public dédié à la mobilité. En parallèle, un enjeu majeur consistera à affiner nos modèles en prenant en compte les facteurs psychosociaux impliqués dans les interactions entre piétons. L’échelle multidimensionnelle de ces facteurs rend cette tâche complexe. Les travaux menés dans l’équipe sur la question de l’effet des émotions ou du contexte social sur la question par exemple de la proxémie mettent en avant la possibilité de paramétrisation de nos modèles selon ces facteurs. Les similitudes observées entre les comportements en réel et en virtuel dans de telles conditions d’interaction font de la réalité virtuelle un outil d’étude clé pour nos futures recherches.
Niveau de lecture
Aidez-nous à évaluer le niveau de lecture de ce document.
Votre choix a été pris en compte. Merci d'avoir estimé le niveau de ce document !

