
L’éveil des bébés robots
Une première version de cet article est parue dans le dossier n°87 Les robots en quête d’humanité de la revue Pour la Science, numéro d’avril/juin 2015.
Dans son parc, un bambin empile consciencieusement un, deux, trois cubes, puis soudain, détruit l’édifice dans un grand éclat de rire. Et il recommence, avec à chaque fois un plaisir intact. Plus tard, près d’une rivière, il jettera quantité de cailloux pour les voir couler et autant de brindilles pour les suivre des yeux lorsqu’elles partent, flottant à la dérive. Ces gestes, mille fois répétés, ne sont pas anodins. Ils sont nécessaires aux êtres humains, dès leur plus jeune âge, pour comprendre le monde qui les entoure. De fait, les enfants expérimentent, construisent, manipulent, cassent… pour tenter de comprendre les forces physiques. Jean Piaget, l’un des pionniers de la psychologie développementale, a beaucoup étudié le rôle de l’action dans l’apprentissage et la découverte chez les enfants.
La science ne fonctionne pas autrement ! Pour comprendre les vagues de l’océan, les chercheurs conçoivent des aquariums géants. Pour expliquer la formation des galaxies spirales, ils manipulent des simulations sur leurs ordinateurs. Ainsi, l’élaboration de modèles aide à construire un savoir. Qu’en est-il lorsque le sujet d’étude est l’être humain lui-même ? Comment élucider les mécanismes de l’apprentissage humain, des émotions, de la curiosité ? Étonnamment, nous pouvons procéder de la même façon, grâce à des robots !
En effet, les chercheurs élaborent des « bébés robots » qui simulent certains aspects du corps et de l’esprit d’un enfant. Puis ils perturbent ces modèles de façon à déduire des comportements observés des informations sur les mécanismes internes. Les robots sont devenus des outils essentiels pour explorer la complexité du développement comportemental et psychologique d’un enfant.
Les sciences du développement ont invalidé la distinction entre la culture et la nature. On sait aujourd’hui que les gènes ne constituent pas un programme figé qui se déroulerait indépendamment de l’environnement.
Plus important, de nombreux comportements ne peuvent s’expliquer par l’expression de quelques gènes, par le fonctionnement d’organes ou par quelques caractéristiques isolées de l’environnement. À l’inverse, ils traduisent les interactions de cellules, d’organes, de mécanismes d’apprentissage, de propriétés physiques et sociales de l’environnement à diverses échelles spatio-temporelles… En des termes plus techniques, le développement cognitif d’un enfant est un système dynamique complexe caractérisé par des phénomènes spontanés d’auto-organisation. De quoi s’agit-il ?
Des systèmes complexes
Les concepts de systèmes complexes et d’auto-organisation ont révolutionné la physique du XXe siècle. Ils s’appliquent à des phénomènes aussi divers que la formation des cristaux de glace, des dunes de sable, des structures galactiques… Ces systèmes se caractérisent notamment par un grand nombre d’entités interagissant et par l’émergence de structures dont le plan global n’est pas présent au départ dans les différentes parties. Les simulations informatiques et les développements des mathématiques ont été un élément clef de l’avènement de ces concepts.
À la fin du XXe siècle, les biologistes se sont emparés de ces idées, par exemple pour comprendre la formation des termitières. Grâce à des modèles, ils ont montré comment des interactions locales de milliers de petits termites, dépourvus de tout plan d’ensemble, peuvent conduire à l’érection de structures globales et fonctionnelles à grande échelle. D’autres simulations ont révélé les mécanismes auto-organisationnels qui expliquent les motifs sur la peau des zèbres et des girafes, les spirales des cornes et des coquilles, les battements du cœur…
Le développement d’un enfant met également en jeu les interactions de nombreux éléments, à un niveau sans commune mesure avec celui des phénomènes précédents. Aussi, pour compléter l’arsenal d’outils conceptuels de la biologie et de la psychologie, les chercheurs ont commencé à construire des machines qui reproduisent certaines étapes du développement d’un enfant.
La construction de machines qui se développent et apprennent comme des enfants n’est toutefois pas une idée entièrement nouvelle. Alan Turing, l’un des pionniers de l’informatique dans les années 1940, avait eu l’intuition de l’utilité des machines pour comprendre les processus psychologiques : « Plutôt que de créer un programme équivalent à l’esprit d’un adulte, pourquoi ne pas tenter d’en concevoir un qui reproduirait le cerveau d’un enfant ? »
Pour plusieurs raisons, les idées de Turing n’ont pas été traduites en un programme de recherche avant la toute fin du XXe siècle. D’abord, les années 1950 ont été celles de l’émergence du cognitivisme et de l’intelligence artificielle. Selon les tenants de ces deux champs scientifiques, l’intelligence est uniquement fondée sur la manipulation de symboles abstraits. Dès lors, ils imaginaient, à tort, pouvoir reproduire directement l’état adulte d’un cerveau.
Ensuite, Turing a négligé deux éléments importants. Pour des organismes réels, l’apprentissage à partir d’une « feuille blanche », sans direction, est inopérant face à un flot gigantesque d’informations arrivant de toutes parts. Au contraire, l’épanouissement d’un enfant a besoin de balises, de mécanismes de guidage ! En outre, Turing n’a pas tenu compte du rôle du corps : le comportement et la cognition s’insèrent dans un « substrat », le corps, qui canalise le développement. Le rôle central du corps est la raison pour laquelle les robots, et non de simples simulations abstraites sur ordinateur, peuvent aider en sciences du développement.
La marche spontanée

En avant marche ! Cette structure adopte naturellement une marche bipède bien qu’elle n’ait ni moteur ni centre de contrôle. Cette marche est un comportement émergent qui résulte des interactions de l’anatomie (mécanique) avec l’environnement. © S. Collins et al / Photo H. Morgan.
Donnons quelques exemples, tel celui de la bipédie. Bien qu’elle nous soit familière, nous sommes loin de comprendre comment nous marchons sur deux jambes et comment les enfants apprennent à le faire. Ce mode de déplacement suppose une coordination en temps réel de nombreuses parties du corps. Chacun de nos muscles et de nos os est comme un musicien d’un orchestre symphonique jouant sa partition. De la cadence et de la coordination de l’ensemble naîtra une œuvre, en l’occurrence… une marche cohérente et efficace.
Mais y a-t-il une partition qui précise le détail de la coordination ? Y a-t-il un chef d’orchestre ? Le cerveau a-t-il connaissance en permanence de l’état du corps et de l’environnement pour décider d’activer les bons muscles ? En termes plus techniques, la marche est-elle équivalente à un calcul ? La plupart des spécialistes de la marche humaine ont longtemps répondu oui. Dans ce cadre, la compréhension du développement de la marche nécessitait d’expliquer comment les enfants apprennent à effectuer ces calculs en temps réel et à faire des prédictions sur la dynamique du corps. Quelques roboticiens désireux de concevoir des machines bipèdes se sont fondés sur cette vision. Cependant, même si l’on compte quelques jolies performances, la plupart des robots obtenus tombaient facilement et avaient une démarche très peu naturelle. On doit donc se rendre à l’évidence, la marche serait un peu plus qu’un calcul. Ou un peu moins…
Dans les années 1990, le roboticien Tad McGeer a conçu une expérience qui a bouleversé cette conception. Il a construit une paire de jambes mécaniques, calquée sur l’anatomie des membres humains et dépourvue de moteur ou de dispositif de calcul. Lancé sur une pente légère, le dispositif a… marché ! À l’aide des interactions des composants mécaniques et de la gravité, les deux jambes ont automatiquement adopté une démarche similaire à celle d’un humain, le mouvement étant par ailleurs robuste et résistant aux perturbations.D’autres laboratoires ont reproduit l’expérience et montré que la marche bipède pouvait durer « éternellement » sur un tapis roulant. La coordination des parties mécaniques du « robot », interagissant localement via les contacts physiques, est donc un phénomène auto-organisé à l’instar d’une termitière. La marche est un comportement dynamique émergent où la physique et l’anatomie ont un rôle essentiel, chacune fournissant à l’autre un support et un ensemble de contraintes.
Ces expérimentations révèlent comment des robots aident à élucider les rôles respectifs du corps et du système nerveux dans un modèle de la marche. Ce faisant, ils améliorent notre compréhension du développement humain. Ici, nous observons l’émergence spontanée d’un phénomène (la marche humaine) qui n’est ni inné (il n’est fondé sur aucun gène) ni acquis (l’apprentissage est absent). La distinction entre l’inné et l’acquis est parfois dépourvue de sens.
Une structure, ici la marche bipède, peut apparaître spontanément et émerger d’interactions biophysiques complexes. Une telle structure peut être mise à profit pour l’apprentissage et le développement. L’expérience précédente conduit ainsi à formuler l’hypothèse selon laquelle apprendre à marcher consiste à exploiter des mouvements qui sont inhérents à la dynamique du corps.
Détaillons un second exemple, celui du rôle de la curiosité dans le développement des enfants. Ces derniers assimilent quantité de choses, le plus souvent progressivement, selon une chronologie spécifique. Ainsi, avant de marcher sur deux jambes sans soutien, ils apprennent à contrôler leur cou, puis à ramper sur le ventre, à s’asseoir, à se tenir debout, à marcher en se tenant aux murs… Comment expliquer cette progression ?
Plusieurs étapes d’une telle « trajectoire développementale » apparaissent dans le même ordre chez de nombreux enfants. Cependant, quelques-uns suivent des parcours différents. Comment expliquer, d’une part, cette apparente universalité et, d’autre part, la variabilité individuelle ? Cette universalité est-elle le fruit d’un programme ? Chaque écart signifie-t-il que quelque chose s’est déréglé dans le programme ?
L’environnement social est un élément central dans le guidage des processus développementaux. Il a été l’objet d’études de roboticiens qui se sont intéressés au rôle de l’imitation, de l’attention conjointe, du langage, de la synchronisation enseignant-élève. Mais une autre force tout aussi fondamentale est à l’œuvre en nous : la curiosité. Elle nous pousse à la découverte, à la création, à l’invention…
Des travaux en neurosciences et en psychologie ont montré que notre cerveau est naturellement enclin à tester de nouvelles activités pour le simple plaisir d’apprendre et de les pratiquer. Toutefois, nous ne savons que peu de choses sur la curiosité et son rôle dans le développement. Les neurobiologistes commencent à peine à identifier les circuits impliqués dans les comportements d’exploration spontanée.
Plusieurs équipes ont proposé, pour améliorer nos connaissances sur la curiosité et son rôle, de fabriquer des robots qui apprennent, découvrent et fixent leurs propres objectifs à partir de modèles d’apprentissage fondés sur des mécanismes d’exploration spontanée. Un exemple est fourni par l’expérience du tapis d’éveil, ou Playground experiment (voir la figure ci-dessous).

Un modèle de curiosité artificielle équipe ces robots. Ainsi dotés, ils explorent un tapis d’éveil où ils apprennent à prédire les effets de leurs actions. Ce faisant, ils acquièrent spontanément des comportements et des connaissances dont la complexité augmente progressivement, par étapes. Photo © Inria / Flowers
Un robot apprend en faisant des expériences : il essaie, observe les effets de ses actes et détecte les régularités entre ses actions et les conséquences. Il peut ensuite faire des prédictions. La façon dont il choisit ses actions relève de la démarche scientifique : il sélectionne les expérimentations qui, selon lui, vont améliorer ses propres prédictions, lui apporter de nouvelles informations, augmenter sa capacité d’apprentissage. Ce faisant, il continue de consacrer une part de son temps à tester d’autres choses afin de découvrir de nouvelles pistes pour progresser. Le robot est aussi doté de mécanismes qui classent des expériences sensori-motrices en différentes catégories selon leur degré d’enrichissement et de contrôlabilité.
Curiosité et auto-organisation
À tout moment de son développement, le robot se concentre sur les activités exploratoires qui améliorent l’apprentissage, en sélectionnant celles qui ne sont ni trop faciles ni trop compliquées (voir l’encadré ci-dessous).
Le modèle de curiosité du robot lui permet de trouver de nouvelles « niches de progrès ». Imaginons un environnement avec quatre types de contextes sensoriels et moteurs pour le robot : il peut dormir, bouger une patte, taper dans une balle sans bouger ou faire du scooter.
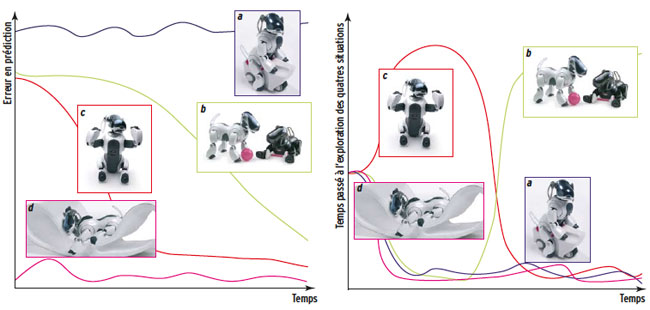
Si l’on forçait le robot à se concentrer sur chacune de ces activités séparément, on mesurerait l’évolution de son erreur en prédiction dans chaque contexte (à gauche). Dans la situation a (faire du scooter), l’erreur en prédiction est toujours élevée, peut-être parce que cette situation est trop compliquée pour le système d’apprentissage. Dans la situation d (dormir), l’erreur est toujours basse et ne change pas (cette situation est facile et donc peu intéressante pour le système d’apprentissage). Dans les situations b (taper dans une balle) et c (bouger une patte), l’erreur en prédiction est importante au départ, mais diminue ensuite. En pratique, le robot placé dans cet environnement ignore les quatre types de situations et, a fortiori, les courbes d’apprentissage correspondantes. Au départ, il explore aléatoirement son environnement, découvrant qu’il existe des situations différentes, et évalue l’intérêt de chacune en termes de réduction potentielle de ses erreurs en prédiction.
Les courbes du temps passé à explorer chaque situation (à droite) montrent que le robot évite les situations a (trop compliquée) et d (trop simple), qui ne permettent pas de progrès en apprentissage. Il les explore cependant de temps en temps et par hasard pour vérifier qu’elles restent peu intéressantes. À l’inverse, il se consacre à la situation c pour laquelle ses prédictions s’améliorent le plus vite. Après un certain temps, la situation c est maîtrisée et, par conséquent, prédictible : il l’abandonne. Il consacre alors l’essentiel de son temps à la situation b qui, à ce stade de son développement, lui procure le plus de progrès en apprentissage.
Ce comportement incarne l’hypothèse que le cerveau privilégie les expérimentations qui sont juste au-dessus de son niveau actuel de connaissances et de compétences. Un tel modèle permet de proposer une définition pratique de la curiosité : elle serait un mécanisme de motivation qui pousse l’organisme à explorer des activités dans le seul but d’obtenir des informations pour elles-mêmes (par opposition à la recherche d’informations dans le but de trouver de la nourriture ou un abri par exemple).
Dans l’expérience du tapis d’éveil, le robot apprend des tâches à partir de ses propres initiatives (par exemple, attraper un objet posé devant lui), mais il fait aussi évoluer son comportement, où apparaissent des phénomènes d’auto-organisation, en en augmentant progressivement la complexité.
Des étapes cognitives apparaissent sans qu’elles soient préprogrammées. Ainsi, après avoir commencé par des mouvements désordonnés, le robot se concentre souvent d’abord sur les mouvements de ses membres pour, éventuellement, atteindre des objets. Ensuite, il s’applique à attraper ces objets avec sa bouche, puis, finalement, explore les interactions vocales avec les autres robots. Pourtant, les ingénieurs n’ont programmé aucune de ces activités, ni a fortiori la chronologie de leur apparition.
Ces paliers, qui traduisent une auto-organisation, résultent des interactions dynamiques entre la curiosité, l’apprentissage et les propriétés du corps et de l’environnement. Quand on répète plusieurs fois la même expérience avec des paramètres identiques, ce sont les mêmes phases, approximativement, qui apparaissent le plus souvent. Mais, quelquefois, des individus intervertissent des étapes, voire acquièrent des savoir-faire différents.
C’est dû à de petites contingences, à des faibles variations de l’environnement physique et au fait que la dynamique du développement dispose de ce que les mathématiciens nomment des attracteurs. Ce sont des états particuliers vers lesquels un système évolue spontanément dès qu’il se trouve à proximité.
Ces expérimentations robotisées nous aident à comprendre le développement. Elles permettent de modéliser les mécanismes d’un apprentissage guidé par la curiosité. Elles montrent aussi comment, sur le long terme, des processus développementaux fondés sur la curiosité peuvent s’auto-organiser et gagner en complexité, sans pour autant avoir un plan prédéfini. Dans ce cadre, les différences individuelles deviennent des phénomènes émergents. On comprend alors comment des processus développementaux peuvent varier selon les contextes, même avec une trame identique sous-jacente.
Comprendre et créer

Poppy a été développé à l’Inria. Ce robot, en open source (tous ses composants sont publics), aide à explorer les mécanismes du développement cognitif des enfants. Il est aussi utilisé pour l’éducation des écoliers et des collégiens.
© Inria / Flowers
La compréhension du développement infantile est un des plus grands défis de la science. Une difficulté importante est que ce développement résulte d’interactions de très nombreux mécanismes à diverses échelles spatiales et temporelles. Une approche systémique et constructiviste semble nécessaire.
Les physiciens l’ont compris il y a longtemps quand ils se sont confrontés aux systèmes complexes. Pour les étudier, ils ont bâti des modèles formels avec lesquels ils simulent des aspects de la réalité. Le physicien prix Nobel Richard Feynman l’a ainsi exprimé : « On ne peut pas comprendre ce que l’on ne peut créer. » Une telle approche a désormais sa place dans les sciences du développement. Avec les robots, le corps devient une variable expérimentale, un élément que l’on peut systématiquement modifier de façon à étudier les effets de ces changements sur le développement. Ce fut longtemps un rêve, c’est aujourd’hui possible.
Livres :
• A. Cangelosi et M. Schlesinger, Developmental Robotics : From Babies to Robots, MIT Press, 2015.
• P.-Y. Oudeyer, Aux sources de la parole, Odile Jacob, 2013.
• G. Baldassare et M. Mirolli, Intrinsically motivated learning in natural and artificial systems, Springer-Verlag, 2013.
Articles :
• J. Gottlieb et al., Information seeking, curiosity and attention : computational and neural mechanisms, in Trends in Cognitive Science, vol. 17(11), pp. 585-596, 2013.
• S. Collins et al., Efficient bipedal robots based on passive-dynamic walkers, in Science, vol. 307, pp. 1082-1085, 2005.
Liens :
• Le site de P.-Y. Oudeyer
• Le bipède de Tad McGeer
• La Playground expriment :
• ICub
• Poppy
 Cette œuvre est mise à disposition selon les termes de la Licence Creative Commons Attribution 4.0 International.
Cette œuvre est mise à disposition selon les termes de la Licence Creative Commons Attribution 4.0 International.
Newsletter
Le responsable de ce traitement est Inria. En saisissant votre adresse mail, vous consentez à recevoir chaque mois une sélection d'articles et à ce que vos données soient collectées et stockées comme décrit dans notre politique de confidentialité
Niveau de lecture
Aidez-nous à évaluer le niveau de lecture de ce document.
Votre choix a été pris en compte. Merci d'avoir estimé le niveau de ce document !
