
Transport automatique en centre-ville : d’une expérimentation à la généralisation ?
Les véhicules automatiques fonctionnent depuis plusieurs décennies dans les usines. Ils apportent régularité, silence, sécurité, efficacité énergétique et environnementale, tout en se déplaçant lentement à 1 m/s. Avec une vitesse quatre fois plus grande, 4 m/s soit presque 15 km/h, donc toujours lente pour une circulation urbaine, peuvent-ils dès à présent offrir des services utiles aux citoyens ?
Cadre expérimental
Les « cybercars » fonctionnent comme l’ascenseur qui date lui, de 1853 : 24 heures sur 24, 7 jours sur 7 et à la demande.
E.G. Otis en 1853 dans le premier ascenseur, équipé d’un parachute pour une « sécurité totale ».
En 1853, Elisha Graves Otis invente le parachute, système de sécurité destiné à retenir les monte-charge en cas de rupture de câble : le premier ascenseur est né, donnant son essor à l’architecture des grandes villes en permettant la construction d’immeubles de grande hauteur.
Notre « ascenseur public horizontal » aura-t-il un impact aussi profond sur la ville du futur ?
À Antibes, près de trois mille personnes ont pu expérimenter pendant dix jours cette nouvelle sorte d’« ascenseur public horizontal » sur le premier tronçon de 320 m d’un projet global de navette automatique.
Le projet global s’inscrit dans une politique à long terme de la Communauté d’Agglomération de Sophia Antipolis, et de la commune d’Antibes – Juan les Pins visant à redonner de l’espace (et du silence) aux habitants du centre-ville.
En France, les centres-villes sont souvent peu adaptés aux véhicules particuliers. Parmi les outils possibles, les parkings relais ou parkings d’échanges se développent rapidement, mais ils supposent des mesures d’accompagnement en termes de stationnement et de navettes d’accès.
La commune d’Antibes projette de telles implantations, dont celui du Fort Carré : un parking de 500 places situé à plus de 1400 m de l’entrée de la vieille ville, donc hors de portée du piéton même « rapide ».
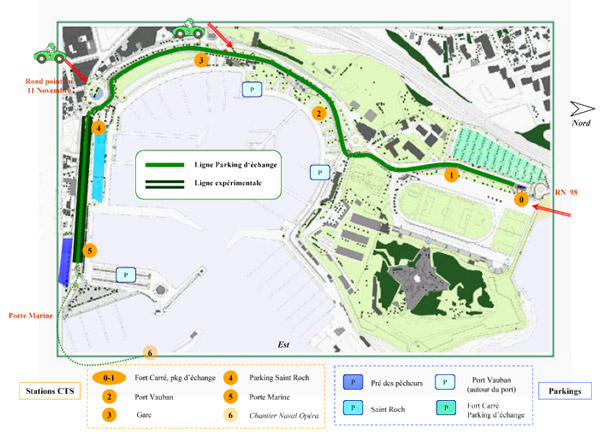
Projet global de parking d’échange et de navette.
Sur le papier, les performances annoncées du système sont certes attractives : temps d’attente de deux minutes et temps de trajet de quatre minutes, garantis 24 heures sur 24, vingt-deux rotations par heure, soit une capacité de transport quotidienne de 7600 passagers, pour un coût d’investissement – trois navettes de vingt places – et un coût opérationnel bien plus faible que les transports en commun ou transports en commun en site propre classiques.
La cible, ce sont les 2850 véhicules particuliers qui cherchent quotidiennement à rejoindre le centre ville. On estime qu’on pourrait réduire de 25% le nombre de ces véhicules. Ces quelque 700 véhicules en moins permettraient de réaliser de fortes économies, si on prend en compte financièrement des aspects qui ne sont pas chiffrés habituellement, comme la pollution par exemple. L’économie annuelle sur l’environnement (baisse du taux de monoxyde de carbone, de dioxyde de carbone, d’oxydes d’azote) est ainsi estimée à 50 000 €. L’économie d’énergie prévue, de 7 800 €, est faible mais réelle. Enfin, la sécurité accrue correspond à 30 000 € annuel.
Le report modal de l’automobile vers la navette est de plus peu sensible à la tarification projetée (1€ aller/retour, parking inclus). Les revenus générés couvriraient alors les frais opérationnels. Le bilan socio-économique attendu sur dix ans est donc positif.
Pour ce faire, il a fallu reconfigurer la voirie : supprimer le stationnement latéral, reporter sur une voie la dangereuse circulation automobile. L’intégration urbaine était un des points les plus importants, car il n’était pas question d’installer des grillages de part et d’autre du trajet. Les piétons n’étaient canalisés que par des agencements d’espaces verts et une signalisation spécifique. Dans le cadre de l’expérience, les modes doux (vélos, roller, véhicules électriques…) partageaient la même voie.
La navette s’arrêtait à cinq abribus dans un sens, et parcourait l’autre sens sans arrêt à une vitesse de 4 m/s (14,4 km/h). Malgré ces courtes distances, l’expérience, riche d’enseignements, va permettre de compléter le programme d’évaluation globale du projet CyberMove.
Si l’objectif principal du projet CyberCars est le développement, l’amélioration des technologies des véhicules et de leurs infrastructures, le projet CyberMove a lui pour double objectif d’évaluer l’impact des applications sur le plan du développement durable et de recenser les barrières au déploiement de ces nouveaux systèmes de transport.
Le processus d’évaluation construit par le département transport de l’université de La Sapienza, à Rome, s’inspire d’une méthodologie développée dans le cadre du projet européen Maestro qui vise à mesurer l’impact de grands projets de transports. La procédure se déroule en plusieurs étapes standard :
- la sélection, qui permet de retenir parmi plusieurs projets, ceux qui seront les plus pertinents selon des critères précis ;
- l’évaluation initiale liste les indicateurs qui permettront de mesurer quantitativement et qualitativement les impacts. Elle déclenche la collecte des données sur chaque site et fixe les objectifs de succès à l’application ;
- une évaluation avant expérimentation, basée sur la simulation, au moyen d’une modélisation précise basée sur un modèle de trafic microscopique ;
- une évaluation après expérimentation en conditions réelles, qui valide les prévisions établies à l’étape précédente.
Cette procédure, réalisée en concertation tout au long du projet sur plusieurs sites en parallèle (plus d’une dizaine) s’est révélée très efficace. Cinq sites (Ouchy près de Lausanne, Bayonne, Antibes, Coimbra et Rotterdam) ont fait ou vont faire successivement des expérimentations dans le cadre de CyberMove, avec une mutualisation des résultats, profitable à tous. Au total, ce sont quarante indicateurs qui permettront à l’issue du projet, en novembre 2004, de mesurer les impacts socio-économiques, sur la sécurité, sur l’énergie et sur l’environnement.
Résultats techniques de l’expérimentation
Le premier volet de l’évaluation technique a pu confirmer d’excellentes performances.
Un critère important – la flexibilité d’installation – a pu être vérifié, avec un temps d’installation record. Une fois les plans détaillés établis, l’installation des deux cents aimants et le relevé précis de leurs positions par un géomètre se sont faits en une nuit. Un mois après, la navette, déchargée du camion à 9 heures, fonctionnait dès le début d’après midi pour dix jours, suivant imperturbablement le programme de travail enregistré en mémoire.
Le guidage, très précis, n’a jamais été pris en défaut durant les 320 km parcourus, à raison de 9 heures par jour. Les manœuvres de demi-tour, la précision centimétrique obtenue aux arrêts, un test « grande vitesse » (25 km/h) : tous les tests permettent d’affirmer que la technologie de contrôle est au point. Le confort des passagers est supérieur à celui d’un système guidé mécaniquement, plus lissé.

Informatique embarquée dans un cybercar.
L’accélération, le freinage et la direction sont contrôlés par ordinateur. Au cours du projet CyberCars, les partenaires ont développé de nouveaux matériels pour une implémentation sûre de ces fonctions. Le centre d’intérêt principal a été le développement de logiciels sûrs.
La certification des logiciels est un élément essentiel. Il s’agit en effet de prouver qu’un contacteur, placé dans le pare-chocs rétractable du véhicule et relié électriquement aux freins, est moins fiable que le traitement des signaux de deux faisceaux lasers redondants et d’une portée de 40 m. Le logiciel est alors au cœur du régulateur de vitesse qui commandera les freins. Les principales difficultés concernent la perception de l’environnement et la définition des vecteurs de tests. Une nouvelle approche a été proposée, associant les risques liés à l’environnement (traversée de piétons, d’animaux) à ceux liés à la conception du logiciel lui-même.
La détection d’obstacle s’est aussi avérée très performante, dans des conditions difficiles puisque le circuit était ouvert, et qu’il est très difficile d’éviter les comportements relevant de l’inconscience. Plusieurs personnes ont ainsi voulu vérifier le bon fonctionnement du système de sécurité, « pour voir », quitte à se jeter devant la navette au dernier moment. Avec pour résultat de vérifier l’efficacité de l’arrêt d’urgence, aux dépens des passagers debout ! La stratégie de sécurité adoptée – ralentir puis réfléchir – a bien fonctionné : une fois les piétons marchant au bord du trottoir détectés, le véhicule ne pourra les croiser à plus de 2 m/s. Mais cette stratégie a un impact certain sur la vitesse commerciale du système de transport, nous y reviendrons plus loin.

Détection de piéton.
La détection d’obstacles est à coup sûr la technologie la plus délicate. Le véhicule en test à Antibes a une « vision » sur quarante mètres grâce à deux faisceaux lasers.
L’interprétation du signal permet de mesurer la distance par rapport aux obstacles, d’en déterminer le sens, la vitesse et d’adapter son comportement : ralentir de façon imperceptible par anticipation ou déclencher un freinage d’urgence lorsque l’obstacle est dans une zone proche (3 m). Le dispositif est complété par une ceinture de capteurs ultrasons de portée plus limitée et un pare-chocs rétractable couplé mécaniquement au dispositif de freinage.
D’autres techniques d’évitement de collision à base de radar et de vision font l’objet de recherches. Ces dernières ne sont pas encore au point, mais semblent très prometteuses pour améliorer les performances.
Le système de supervision, installé à titre de démonstration principalement, a lui aussi bien fonctionné, après quelques soucis de réglages d’antennes, la couverture radio étant perturbée par les arbres faisant obstacle aux ondes radios.
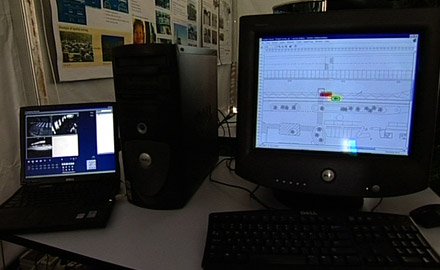
Poste de supervision expérimental à Antibes.
Le véhicule n’est jamais laissé à lui-même, car un technicien peut à tout moment reprendre le contrôle à partir d’un poste de supervision. Un réseau sans fil basé sur le standard IEEE802.11b transmet à un poste de supervision tous les paramètres : vitesse, état de charge des batteries, nombre de passagers, mais surtout les images fournies par trois caméras embarquées. La première donne une vision sur l’intérieur de la cabine, les deux autres transmettent la scène face au véhicule selon deux points de vue différents (l’une à quelques centimètres du sol, l’autre en hauteur, offre un champ de vision sur 40 m). Le superviseur peut à tout moment décider d’arrêter le véhicule ou de s’adresser aux passagers.
L’avis du public

Une classe d’école primaire essaie la navette (école Guynemer, Antibes).
Puisque la technique semble au point, voyons ce qu’en pense le public !
Nous avons recueilli près de trois cents questionnaires auprès du public, interrogé sur le fonctionnement du système, mais aussi sur son rôle de transport de proximité. Tous portent un fort intérêt à ces solutions innovantes : « Quand pourra-t-on l’utiliser ? » ou « Il faut prolonger le trajet jusqu’au centre ville » ou encore « Cela donne une image de modernité au transport public. »
Le service est jugé utile, facile à utiliser, économique, avec de bonnes performances (même si certains ont trouvé les 15 km/h un peu lent !), confortable, silencieux, respectueux de l’environnement. Parmi les nombreuses réactions positives, celles des personnes dont les difficultés liées à la mobilité urbaine sont extrêmes : personnes à mobilité réduite, personnes âgées et enfants.
Monsieur Gérard Uzan, chercheur de l’université Paris V, aveugle, participait à la journée du 4 juin 2004 organisée par l’ESSI, école d’ingénieurs de Sophia Antipolis, ayant pour thème « Les déficients visuels et les nouvelles technologies ». Il a bien voulu participer à l’expérimentation CyberMove, qui avait lieu à quelques kilomètres de l’ESSI, et nous a fait parvenir cette contribution très importante pour nos travaux. Nous tenons à l’en remercier.
« Sur un plan général : Pour se déplacer sur des petites et moyennes distance urbaines, les personnes déficientes de la vision sont souvent confrontées à un arbitrage entre l’usage de transport collectif, l’assistance individuelle, le déplacement piéton ou… la substitution du déplacement par d’autres pratiques. Elles illustrent de ce point de vue les difficultés des personnes à mobilité réduite (PMR) et des personnes urbaines résidentes n’utilisant plus de véhicule particulier en ville. À ce difficile arbitrage, la navette offre une solution originale : une fréquence de passage élevée, régulière sur des segments horaires très larges et homogènes d’un jour à l’autre qui contraste avec celle de transport collectif dont les plages et rythmes semblent contraints par les coûts d’exploitation et des objectifs de couvertures spatiales ou d’échanges centre-périphérie, et dont l’accès ou le système d’information restent insuffisants ; une fréquence de passage élevée, c’est aussi permettre à tout instant la décision de déplacement sans « planification » ni « synchrodépendance » (par exemple lié à l’accompagnement par un tiers), accroissant l’autonomie et incitant aux déplacements. Encombré d’une poussette, de paquets ou … d’une canne blanche, le déplacement pédestre s’effectue avec un « coût humain » (lenteur, charges physiques ou cognitive due à une vigilance accrue, évitement d’obstacles micro-incidents), la navette peut devenir un instrument d’allégement de « coût humain », à condition que les durées, conditions physiques d’attente, de montée et descente du véhicule, d’entrée et d’extraction de siège, de maintien en station debout, d’accès aux commandes d’arrêts et au système d’information voyageur maintiennent le gain d’allégement. »
L’absence de conducteur et le déplacement des véhicules en milieu urbain ouvert peut susciter à la fois l’attrait et l’inquiétude : l’attrait économique qui consiste moins à minimiser les effectifs de personnel exploitant que de maximiser le nombre et la fréquence de passage des véhicules sous le contrôle à distance d’un opérateur ; l’inquiétude de la personne qui n’est plus « ni en attente, ni dans la navette » mais se déplace en croisant, stationnant ou longeant son parcours. Comme pour un déplacement dos au véhicule ou pour un enfant, la vulnérabilité du piéton déficient visuel apparaît chaque fois que le risque de contact et le comportement d’alerte et d’évitement doit être à la charge du véhicule ou de son conducteur. Fondée sur une détection à trois niveaux (40 m, 3 m, contact), et un comportement de freinage, d’arrêt et d’alerte sonore associés, la visualisation par l’opérateur distant, tout cela peut sembler suffisant en cas de présence humaine ou d’objets inopinée à l’avant. L’un des rôles de l’expérimentation est de confronter la navette à la diversité des situations dont certaines, qui ne seront pas observées, doivent néanmoins être envisagées (par exemple enfant courant après un ballon, personnes aveugles réalisant un écart de trajectoire…).
En prenant place dans le véhicule durant un double parcours, l’exploration rapide de quelques « points d’évaluation » (accès, commandes à disposition du public, confort, système d’informations visuelles et sonores, sécurités et comportement d’urgence) souligne la pertinence de solutions technologiques embarquées, que des spécifications ergonomiques précisées pourraient optimiser, tant sur le plan de l’« utilisabilité » et de l’usage, que sur les exigences fonctionnelles et économiques d’exploitation.
Les 2 axes insuffisamment explorés :
- intégration dans le tissu urbain (usage/utilité/gêne pour les personnes et activités en proximité – résidents-habitants, commerçants et autres professions : comment susciter l’usage, réduire les gênes ou réticences, faciliter son intégration identitaire de la ville et de ses habitants)
- sécurité et sûreté (adopter une méthodologie de prise en compte et d’anticipation des « micro-incidents », « microdéfaillances », des interruptions et discontinuités de service durant l’exploitation, comment rassurer de l’apparente absence humaine de service dans les véhicules et points d’arrêt), ergonomie des interfaces (système d’information voyageurs, communication voyageurs/superviseurs, commandes à la disposition des voyageurs (appel et arrêt du véhicule, ouverture et (non) fermeture de portes, contact opérateur, intervention d’urgence, etc.). »
Le plus étonnant est sans doute cette réaction des enfants d’une classe de CM1 : « Enfin des voitures qui s’arrêtent lorsque nous traversons à un passage piéton ». Il semblerait que le code de la route soit mieux respecté par les cybercars que par les automobilistes !
 |
 |
 |
| Dessins d’élèves de CM1 (école Guynemer, Antibes). | ||
Plus prometteur encore, le système de mobilité – ayant pour but de désengorger le centre ville en garant sa voiture à l’entrée de la ville – rencontre une adhésion remarquable : 67% des personnes ayant répondu aux questions des enquêteurs et enquêtrices bénévoles.
Ces bons résultats sont-ils suffisamment significatifs? De fait, l’analyse des questionnaires montre que peu d’actifs se sont rendus sur le site d’essai, avec près de 60% de plus de cinquante ans parmi les personnes ayant répondu. Par ailleurs, des réactions d’indifférence ou d’hostilité ont été entendues sans pouvoir être quantifiées. Il faut donc prendre avec humilité ces résultats.
Des questions ouvertes
Les cybercars sont-ils encore en phase de recherche ou bien réellement en développement ?
Sur le plan technique, l’innovation pose deux difficultés principales :
- l’autonomie réduite, liée à l’utilisation d’une batterie qui limite les premières applications à des distances de 1 à 3 km ;
- la faible vitesse atteinte, limitant la capacité de transport des cybercars.
La propulsion hybride (électrique/thermique) permettra d’augmenter la portée des cybercars. L’amélioration de la détection d’obstacles est attendue de la fusion de données issues des capteurs actifs (lasers) et passifs (vision). Associée à une infrastructure intelligente, signalisation pour les piétons notamment, cela devrait permettre d’atteindre une vitesse de service suffisante en vue d’une exploitation concrète.
Sur le plan socio-économique, les deux principales questions qui reviennent et pour lesquelles les réponses ne sont pas satisfaisantes aujourd’hui sont liés à l’automatisme : emploi et convivialité.
La réponse classique est valable ici : « la qualité de service est augmentée à niveau d’emploi constant ». Un système de trois navettes nécessite la présence d’une personne en continu pour la supervision, deux personnes sont en charge de la maintenance. Il est certain que la convivialité apportée par le chauffeur pour des transports de proximité ne pourra pas être comblée par un système d’information, même performant. On peut cependant s’inspirer de l’histoire des ascenseurs qui étaient conduits à leurs débuts par une personne.
D’une expérience à sa généralisation ?
Étendues à l’échelle d’une ville, d’un pays, de l’Europe, ces technologies pourraient offrir une réponse au drame du changement climatique annoncé. Mais une introduction brutale de technologies peut effrayer : la déshumanisation, notre sécurité dans les mains de caméras et les difficultés de mise en œuvre rendent impalpable cette généralisation. Alors, comme il a fallu cinquante ans de tout automobile pour nous rendre dépendants, nous faudra-t-il encore cinquante ans pour matérialiser cette vision innovante de la mobilité du futur ?
Ce qui nous semble clair est que l’Histoire devra commencer dans les centres-villes, avec les déplacements de proximité. Les transports de personnes, et plus encore de biens, y sont responsables d’une part importante des émissions de CO2. Avec un gaspillage d’énergie démentiel, puisque ces déplacements se font en majorité dans des véhicules de plusieurs centaines de kilos, transportant un peu plus d’une personne (1,2 en moyenne urbaine) avec une puissance minimum de quelque 30 kW, sachant qu’en admettant la mécanisation du déplacement inévitable, seuls 2 kW sont nécessaires.
Mais une expérimentation sur 320 mètres n’est pas suffisante pour démontrer les économies d’énergie immenses qu’apporterait l’optimisation d’une flotte de véhicules.
De même, la capacité à désengorger les centres-villes n’est pas démontrable. Dans l’état actuel des recherches en modélisation du trafic, on est incapable de projeter les résultats des premiers sites étudiés, d’une longueur de quelques centaines de mètres, à l’échelle d’une ville.
La liberté de se déplacer est perçue comme importante. Aujourd’hui, seuls 30% des déplacements seraient systématiques (donc organisables), en particulier les trajets domicile-travail. Les 70% restants sont très difficiles à caractériser – et c’est très bien ainsi. Cette évolution de la société du temps libre rend cependant difficile la tâche des planificateurs de trafic, voire impossible à infrastructure constante.
La relation à la vitesse doit être au cœur de la réflexion, et passer du paradigme de vitesse (toujours plus vite) à la maîtrise du temps. Il est curieux de constater que depuis 2000 ans, la vitesse de déplacement urbaine dite de porte à porte n’a pas beaucoup évolué dans les centres-villes. On est toujours autour des 10 km/h, elle serait même en régression pour les « transports en commun ». Il y a donc bien un problème d’appréciation du temps. Fonctionnant à 15 km/h, nous pensons avoir démontré que l’on peut utiliser de petits véhicules urbains lents, légers et à propulsion électrique pour les déplacements courts.
L’impact des technologies
Les sciences et technologies de l’information et de la communication ont un grand rôle à jouer si elles s’intègrent dans une démarche de recherche et expérimentations, d’autant plus difficile à mener dans le domaine du transport que les motivations de 70% de déplacements individuels ne sont pas modélisables.
Les technologies de l’information permettent de choisir à tout moment le meilleur mode de déplacement, utiliser le système ayant la plus grande efficacité énergétique et environnementale (de ce fait, le plus économique), voire décider de ne pas se déplacer grâce aux moyens de communication.
L’automatisation nécessite, elle, plus de précautions, elle est accusée de déshumanisation ! Il faut donc évaluer ses impacts point par point, en impliquant tous les acteurs : usagers, opérateurs, économistes, autorités politiques.
Plusieurs problèmes pluridisciplinaires restent ouverts, qui pourraient associer les STIC aux domaines de l’économie, puisqu’il y a un réel potentiel de croissance durable ; des sciences sociales, comme la psychosociologie qui étudie les usages ; des techniques de marketing et de communication ; voire des sciences politiques et du droit, car aujourd’hui, alors que 50% des Français n’ont pas le permis de conduire, l’automobile fait la loi. En tout état de cause, le débat ne peut avancer qu’en s’appuyant sur l’expérimentation en grandeur réelle.
Niveau de lecture
Aidez-nous à évaluer le niveau de lecture de ce document.
Votre choix a été pris en compte. Merci d'avoir estimé le niveau de ce document !
