L’intelligence visuo-motrice
De nombreux agents mobiles autonomes tels que l’homme, le chat, la mouche, sont capables de se guider dans les environnements les plus imprévus, sans utiliser ni radar, ni sonar et sans être reliés par un ombilical à quelque supercalculateur. Pour contrôler finement leur navigation et éviter les obstacles, ces « véhicules » font appel à un système visuel embarqué, dont les capteurs sont passifs et dont les processeurs neuronaux répétitifs effectuent en parallèle et de manière asynchrone des milliers de calculs sur le flux visuel, c’est-à-dire sur l’image rétinienne mouvante qui accompagne en particulier la locomotion.
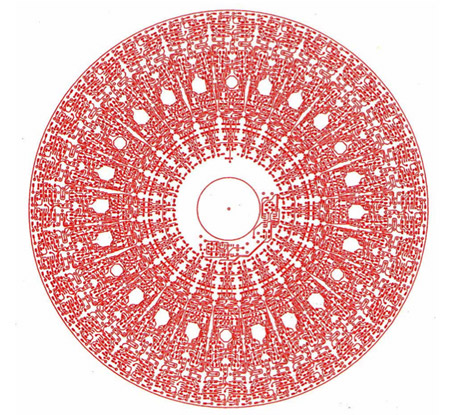
Traitement visuel rétinotopique.
Photo : N. Franceschini et C. Blanes
Routage des composants électroniques qui, à bord du robot-mouche, réalisent la fusion des informations visuelles relatives aux obstacles et au but, et assurent ainsi l’évitement d’obstacles. Ce réseau rappelle ceux des aires visuelles des vertébrés et des insectes. Comme dans les systèmes nerveux animaux, le « programme » est ici câblé dans la structure et la mosaïque observée résulte de la projection rétinotopique de l’espace visuel sur des modules de traitement hautement répétitifs.
À tout organisme qui ose faire un pas en avant se pose le problème, considéré comme ardu en intelligence artificielle, d’élaborer rapidement une commande motrice à partir de maints signaux de référence visuelle. Extraire l’information utile du flux visuel impose l’existence, dans les systèmes visuels animaux, d’un gigantesque réseau de neurones détecteurs de mouvement. On sait, depuis une quarantaine d’années, que de tels neurones existent non seulement dans le système visuel des vertébrés, mais aussi dans celui des insectes, ce qui présente par ailleurs des avantages certains pour l’analyse comportementale de contrôles visuo-moteurs plus savants et de leurs bases neuronales. En effet, en étudiant les modèles animaux les plus simples, qui sont les plus faciles à appréhender, il est possible de mieux cerner les mécanismes premiers mis en jeu. Grâce à la stabilité des structures neuronales, qui présentent de grandes ressemblances au cours de l’évolution des espèces, ces résultats aident à comprendre les systèmes nerveux plus évolués.
Quand l’œil à facettes de la mouche…

Les yeux à facettes de la mouche.
Photo : N. Franceschini
La mouche est un micro-aéronef agile transportant le million de neurones de son système visuel dans les environnements les plus imprévus, sans être relié par un ombilic à un ordinateur au sol. Cette créature autonome, dans laquelle des milliers de capteurs sont reliés à des dizaines d’actionneurs par des interfaces de haut vol, illustre des problèmes généraux de contrôle sensori-moteur savant, et offre ainsi la perspective de pouvoir relier des études communes à l’intelligence naturelle et à l’intelligence artificielle.
La mouche est un aéronef agile dont les yeux composés sont de véritables joyaux d’optronique et de neuronique intégrées. Un œil comporte 6 000 facettes, et la lumière arrivant sur chacune d’entre elles est analysée par 8 cellules photo-sensibles, soit 48 000 cellules au total. Les yeux abritent un réseau cristallin de neurones chargés du traitement parallèle de signaux électriques analogiques (0-100 mV) issus des 6 000 pixels. Fort d’environ un million de neurones, ce réseau envoie des « commandes électriques de vol » à 17 paires de muscles actionneurs qui ajustent en temps réel l’amplitude, la fréquence et l’angle d’attaque des ailes, permettant ainsi à l’animal de redresser son vol, d’éviter les obstacles et de garder le cap. Contrôles en roulis, tangage et lacet sont gérés par des lots spécifiques de neurones dont la forme et la réponse électrique sont aujourd’hui connues avec précision. Mais les 48 000 capteurs opto-électriques que renferme le cockpit de la mouche ne sauraient assurer leur fonction correctement s’ils n’envoyaient pas eux-mêmes des commandes électriques à 21 paires d’actionneurs assurant le positionnement dynamique de la tête, porteuse de ces mêmes capteurs. Un microscope de stimulation spécial exploitant l’une des 6 000 facettes de l’œil comme objectif (diamètre : 25 µm, distance focale : 50 µm) nous a permis de stimuler une à une les cellules photoréceptrices de la mosaïque rétinienne (diamètre : 1 µm) et de découvrir la logique cachée d’un neurone détecteur de mouvement, élément de base pour le contrôle de la navigation aérienne.
…guide les pas du robot
Les principes de traitement du signal relatif aux neurones détecteurs de mouvement chez la mouche ont pu être transposés en opto-électronique et incorporés au système visuel d’une créature terrestre artificielle. Cette créature expérimentale, dont l’œil composé est équipé d’une centaine de facettes et de plusieurs ganglions optiques, apprécie la distance des obstacles à partir du flux visuel et réussit à les contourner à une vitesse de 50 cm/s, ce qui représente pour elle une grande vitesse. Tant la conception que la réalisation électronique (parallèle et analogique) de cette créature s’inspirent des réseaux neuronaux naturels, avec certaines de leurs contraintes.
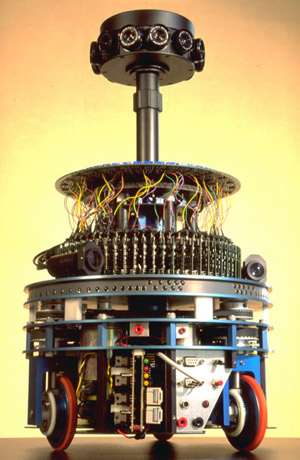
Le robot-mouche.
Photo : N. Franceschini et C. Blanes
Complètement autonome, le « robot-mouche », qui pèse 12 kg, navigue à 50 cm/s dans un champ d’obstacles disposés aléatoirement, en détectant le flux optique engendré par sa propre locomotion. Il est équipé d’un œil à facettes (visible à mi-hauteur) et d’un réseau de 114 « neurones détecteurs de mouvement », transcrits en électronique selon le principe élucidé au préalable dans l’œil de mouche au moyen de microélectrodes et de microscopes spéciaux, construits pour la circonstance.
Cette synthèse d’un système visuel partiel a montré que, couplé à un système visuo-moteur simple basé sur l’établissement d’une carte locale de l’environnement, un réseau de neurones détecteurs de mouvement est suffisant pour permettre à un véhicule de circuler dans un environnement encombré tel qu’une forêt. Par ailleurs, l’adjonction d’un système visuel auxiliaire chargé de détecter la cible à atteindre, nous a permis de faire une première incursion dans cet art, propre aux systèmes nerveux naturels, de la « fusion multisensorielle » à base de réseaux de neurones analogiques.
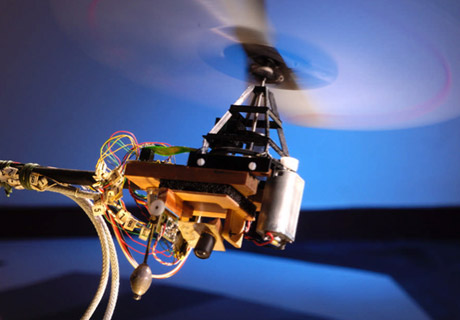
Le robot OCTAVE.
Photo : H. Raguet
OCTAVE est un hélicoptère captif de 100 grammes doté de vision. Son œil ventral observe le relief survolé à 3m/s et mesure le flux optique de translation grâce à un neurone détecteur de mouvement (de masse 0,8 gramme) dérivé de la mouche. Né d’une formalisation du comportement visuomoteur du moustique et du criquet migrateur, son pilote automatique innovant (qui a donné naissance à un brevet CNRS) est un « régulateur de flux optique », qui lui permet de réaliser des prouesses telles qu’un décollage automatique, un suivi de terrain automatique, un atterrissage automatique, ainsi qu’une réaction sensée à des perturbations telles qu’un vent de face ou un vent arrière.
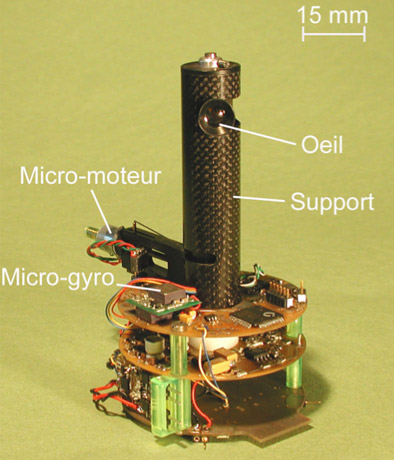
Micro-œil à réflexe vestibulo-oculaire.
Photo : N. Franceschini
Le micro-œil (10 grammes) est capable de fixer et de suivre du regard un bord contrasté ou une barre en mouvement, tout en rejetant les perturbations affectant son support (sa « tête »). Totalement autonome, ce système visuel est doté d’un réflexe vestibulo-oculaire semblable à celui de la mouche et de l’homme. Sa rapidité et sa précision sont semblables à celles de l’homme – mais moins bonnes que celles de la mouche.
En nous inspirant de principes sensorimoteurs élucidés chez la mouche ou chez l’homme, nous avons pu en une quinzaine d’années construire sept robots neuromimétiques, terrestres ou aériens, qui sont venus enrichir notre compréhension du vivant tout en donnant naissance à divers brevets de capteurs ou de pilotes automatiques innovants.
Construire un agent mobile autonome doué d’intelligence visuo-motrice en s’imposant délibérément des contraintes biologiques permet :
- d’apprécier la raison d’être, voire l’ingéniosité des solutions que nous propose l’évolution ;
- de guider la recherche neuro-anatomique et neurophysiologique en prédisant le genre de circuits que l’on peut s’attendre à découvrir dans le cerveau d’une créature mobile vivante ;
- d’apporter du même coup à la robotique mobile des solutions de contrôle visuo-moteur « bas niveau », robustes et bien éprouvées, susceptibles de compléter harmonieusement l’exécution de tâches de plus haut niveau, telle la planification de trajectoires.
Si cette approche de type « intelligence artificielle » s’est révélée riche en retombées physiologiques, c’est parce qu’elle nous a contraints à examiner de sérieux problèmes déjà résolus par le système nerveux des mobiles vivants les plus humbles qui, dès le Cambrien, il y a plus de 500 millions d’années, savaient transporter leur œil dans les environnements les plus complexes.
Une première version de cet article est parue dans le Courrier du CNRS n°79.
Niveau de lecture
Aidez-nous à évaluer le niveau de lecture de ce document.
Votre choix a été pris en compte. Merci d'avoir estimé le niveau de ce document !

Nicolas Franceschini