Des formes aux formules, ou comment les singularités nous aident à mieux calculer
En mathématiques et plus particulièrement en géométrie, c'est un peu la même chose : quand on cherche à comprendre la structure d'objets ou de modèles mathématiques, il y a des endroits qui attirent l'attention, où il se passe des choses intéressantes, qu'on appelle des singularités, et d'autres parties lisses, génériques, reliant entre eux ces lieux singuliers.
Tout d’abord, qu’entend-on, d’un point de vue mathématique, par singularité d’une fonction f ? C’est un point p0 pour lequel l’ensemble des solutions de l’équation f(x)=p0 n’est pas semblable à celui de f(x)=p quand p est voisin de p0.
L’œil est naturellement entraîné à utiliser ces singularités pour comprendre les formes. L’extraction de contour apparent nous permet de comprendre que nous voyons un objet qui ressemble à un tore, dans la figure ci-contre. Dans ce cas, si f est la projection qu’effectue notre œil sur le plan rétinien, pour un point p situé à l’intérieur du contour apparent, f(x)=p a plusieurs solutions sur le tore. Mais si p est à l’extérieur de ce contour apparent, alors f(x)=p n’a pas de solution. Le contour apparent est donc le lieu des singularités visibles de la projection d’une surface sur le plan de visualisation.
Analyser les formes se fait souvent par coupe ou section en des lignes de niveaux d’une fonction f (par exemple la hauteur). Il s’agit donc de comprendre localement ce qui se passe quand on traverse une singularité de cette fonction, et comment tous les chemins sur les parties lisses mènent à ces singularités.
Quand on veut modéliser des formes sur ordinateur, quand on cherche à calculer avec ces modèles ou à simuler un phénomène réel, on est donc effectivement confronté à ces problèmes de singularités. En CAO par exemple, ou pour beaucoup d’opérations géométriques qui servent à construire des modèles numériques d’objets, on a besoin de calculer des intersections de surfaces. Dans des constructions d’offset, ensemble de points à une distance donnée d’une surface, ou de surface de raccordement entre plusieurs surfaces, on a besoin de détecter les points d’auto-intersection, qui ont pu se produire lors de la construction, comme sur cette figure :
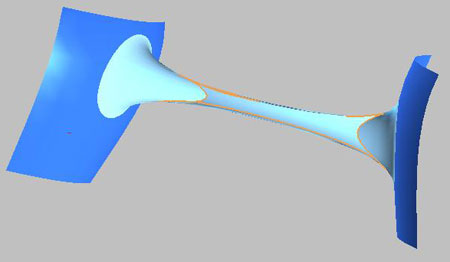
Surface de raccordement, ayant des points singuliers (en orange).
Pour analyser, comparer, classifier des formes, on peut vouloir identifier des plis de la surface, aussi appelés lignes de crêtes, où une des courbures de cette surface atteint une valeur extrême. On peut vouloir calculer un squelette de la forme, comme l’ensemble des points médians, équidistants du bord. On obtient cet ensemble comme l’ensemble des lieux critiques de fronts d’ondes se propageant le long des normales au bord de l’objet. Ces singularités apparaissent donc réellement, naturellement, pour ne pas dire au premier tournant.
Classification des singularités isolées
D’un point de vue théorique, l’étude de ces singularités est un domaine des mathématiques très riche, très intéressant… et très complexe. Des travaux pointus des écoles russe, française, ou anglo-saxonnes, dans les trente dernières années, ont fourni une classification (moyennant des transformations analytiques) des singularités possibles sur une surface, ou d’applications d’un espace affine dans un autre.
Des modèles canoniques sont également fournis pour chacun de ces types de singularités. Les classes principales de singularités isolées appelées A1, A2, A3…, D1, D2…, E1, E2… sont regroupées par familles, liées aux transitions qui peuvent exister entre elles. Cette classification est raffinée par des informations supplémentaires de signes.
De manière surprenante, ces formes canoniques sont définies par des équations polynomiales simples. Par exemple, le premier type de singularité A1 – a pour équation canonique celle du cône, x2 + y2 – z2 = 0.
Une singularité de type A2 + -, d’équation canonique x3 + y2 – z2 = 0, est localement une surface de la forme :
Une singularité de type A3 – – , qui a pour équation canonique x4 – y2 – z2 = 0, est localement une surface de la forme :
La singularité E7, d’équation canonique x3 – x y3 – z2 = 0, est localement de la forme :
Ce n’est qu’un tout petit aperçu de cette classification des singularités isolées, où des modèles polynomiaux, à première vue anodins, décrivent des formes parfois très complexes.
Combinaisons et déformations
Dans beaucoup de problèmes, ces singularités ne restent pas isolées et peuvent se combiner entre elles ou se déformer. Voici une autre équation, x2 z – y2 = 0, également très simple, qui nous fournit une droite de points singuliers :
Cette singularité, dite de Whitney, représente la déformation d’une singularité plane de type A1 – en une singularité de type A1 +. Elle apparaît naturellement, par exemple, en 6 endroits sur cette surface, paramétrée par des polynômes de degré 2, et que l’on appelle surface de Steiner :
Son équation implicite est :
x2 y2 + x2 z2 + y2 z2 – x y z = 0.
Expliquer les transitions possibles des singularités par déformations est un des problèmes auxquels la théorie des singularités s’attache à fournir des réponses. Ce domaine des mathématiques est fascinant, non seulement par les techniques puissantes qu’il développe, et par la variété de formes et de problèmes qu’il permet d’appréhender, mais aussi, osons le dire, par l’esthétique que possèdent ces surfaces algébriques singulières.
Nous avons regroupé un certain nombre de ces modèles algébriques implicites sur notre site web. Les images sont produites à partir d’approximations par maillage des surfaces, qui sont également accessibles à partir de ce site. Ces maillages sont calculés par des outils de résolution issus de la bibliothèque logicielle SYNAPS. Une des difficultés est le calcul d’une triangulation autour des lieux singuliers. Des travaux de recherche menés récemment dans le projet GALAAD nous ont permis de mettre au point un nouvel algorithme construisant, de manière certifiée, un tel maillage isotope de la surface implicite (c’est-à-dire pouvant se déformer bijectivement et continûment en la surface). Nous prévoyons d’enrichir ce site par d’autres surfaces algébriques (singulières), apparaissant dans les problèmes de modélisation géométrique.
Des singularités pour mieux calculer
Mais peut-on vraiment exploiter ces résultats pour améliorer nos algorithmes géométriques ? Dès que nous voulons transporter cette analyse sur ordinateur, nous devons faire face aux problèmes de codage et de représentation d’objets définis implicitement. Des approximations sont souvent utilisées pour mener à bien les calculs. Pouvoir certifier que ces approximations sont valides et contrôler les déformations entre une solution exacte et un calcul approché est donc un des enjeux importants de la modélisation géométrique.
Or si, comme souvent on le pense, un calcul approché peut correspondre à la solution exacte d’un problème voisin, c’est loin d’être le cas en présence de singularités, où le problème voisin n’est pas semblable au problème initial. Pour contrôler les calculs, il faut donc détecter ces singularités, lieux où le calcul approché ne fournit pas forcément la solution attendue, et comprendre les changements topologiques autour de ces singularités. Être capable d’identifier, dans un voisinage ou dans un domaine d’étude, les situations les plus singulières est en effet souvent le meilleur moyen de rendre les calculs approchés plus sûrs. Par exemple, pour calculer de bonnes approximations de courbes d’intersection de surfaces, il est intéressant de calculer d’abord les points singuliers ou critiques pour une direction de projection, et de connaître le nombre de branches aux points singuliers. L’étape d’approximation numérique n’en sera que plus facile. De même, connaître les courbes singulières sur des surfaces, ou les intersections entre deux surfaces dans des arrangements géométriques, permet de mieux mailler (ou approcher) un objet tridimensionnel. Comprendre à quelle famille de déformation correspond le problème que l’on étudie, et déterminer quels paramètres choisir pour une représentation canonique, permet alors de simplifier le problème numérique, et ainsi de mieux calculer.
N’ayons donc pas peur des singularités ! Étudions-les et utilisons-les dans nos algorithmes. Elles sont si belles !
Niveau de lecture
Aidez-nous à évaluer le niveau de lecture de ce document.
Votre choix a été pris en compte. Merci d'avoir estimé le niveau de ce document !
